
程序下载:麦克纳姆轮S1战车


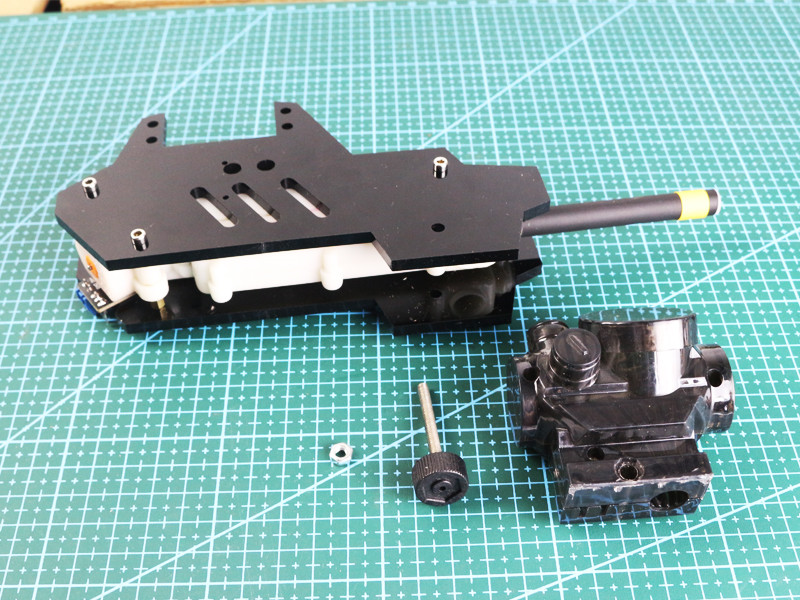
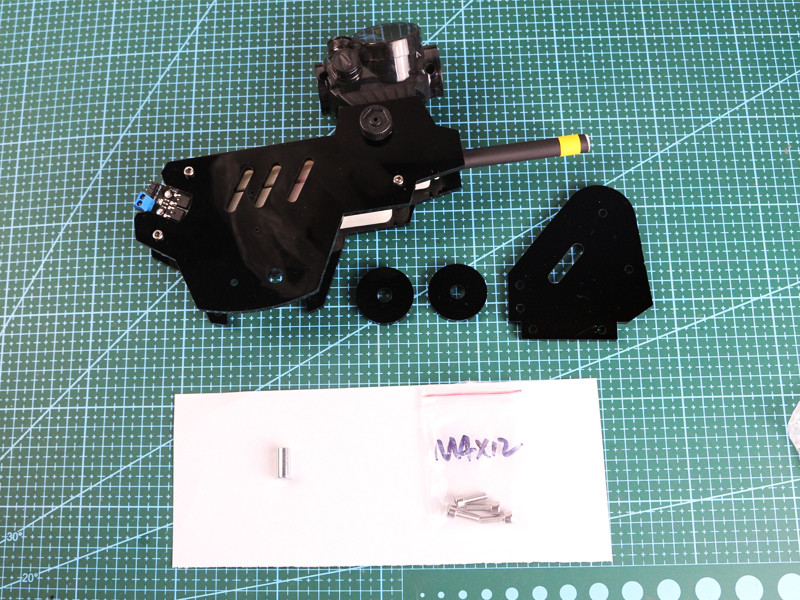
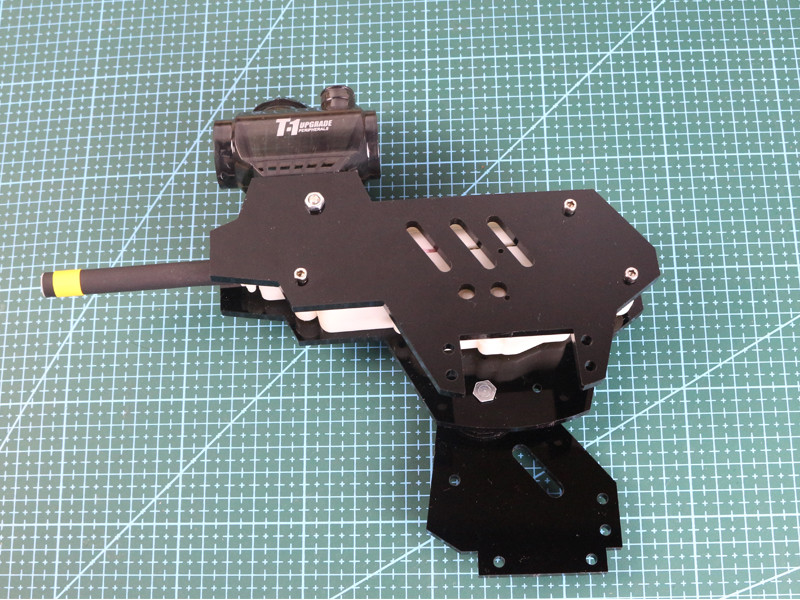
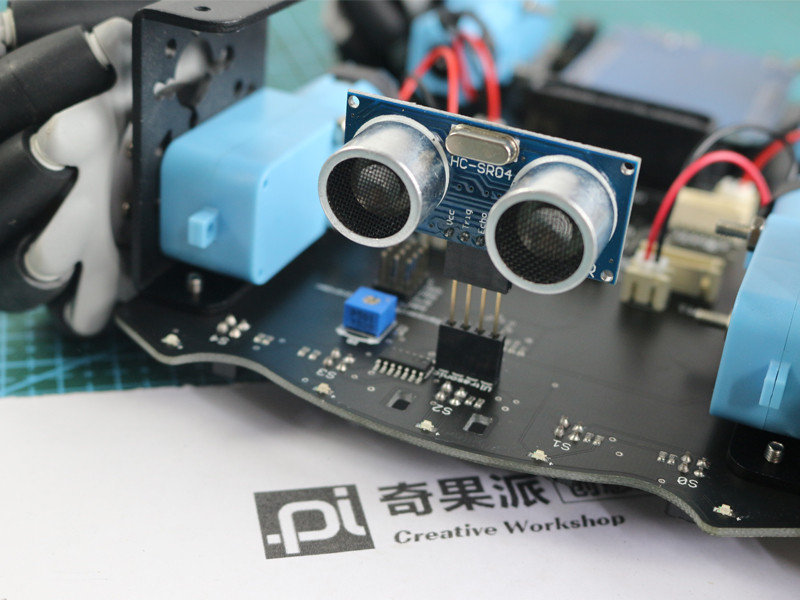
安装发射器
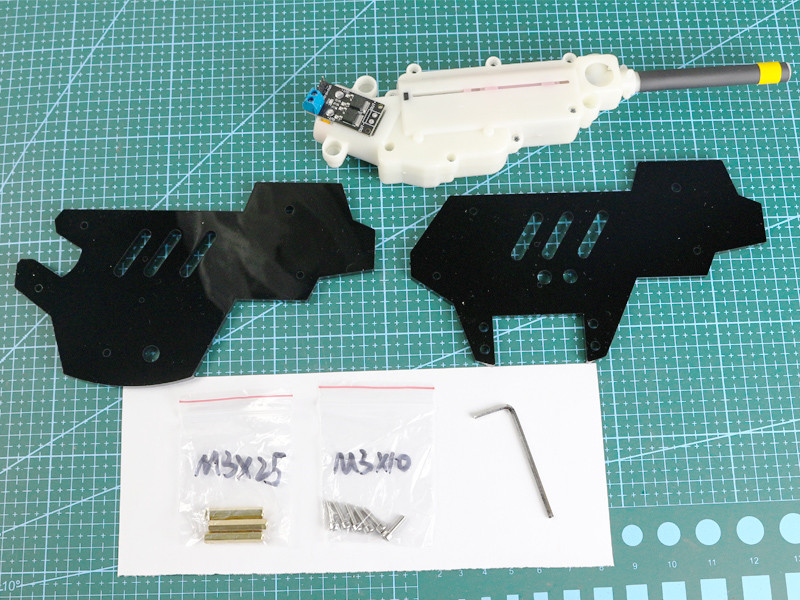
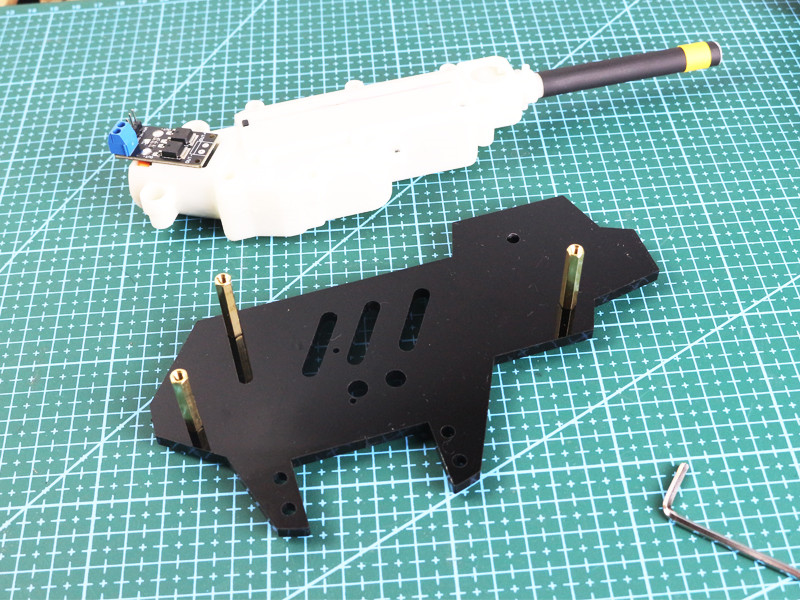
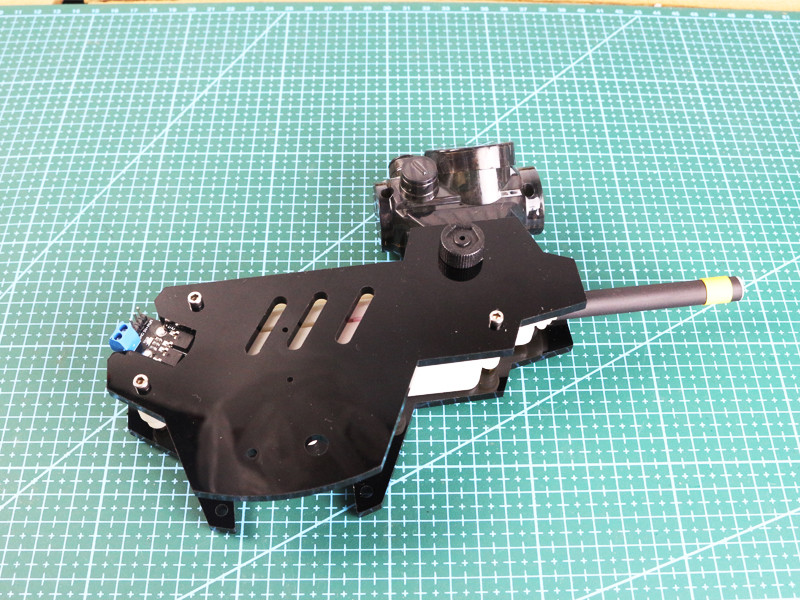
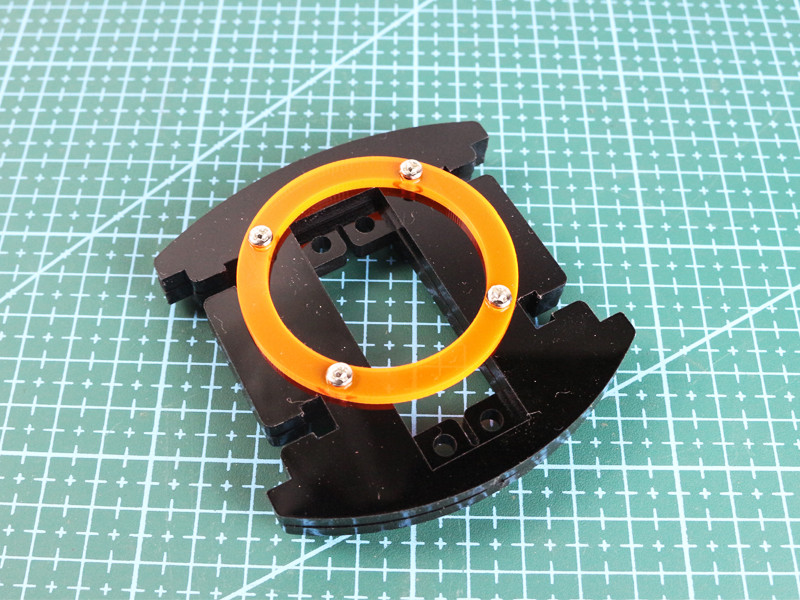
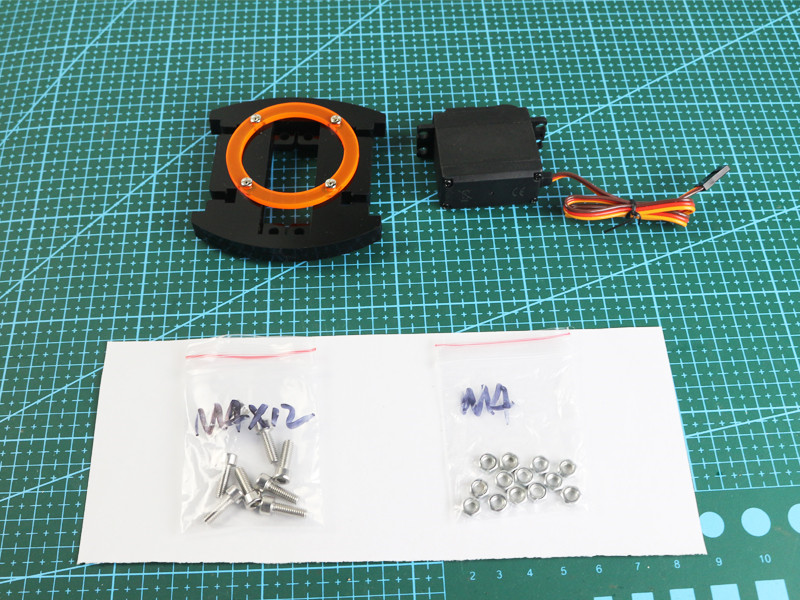
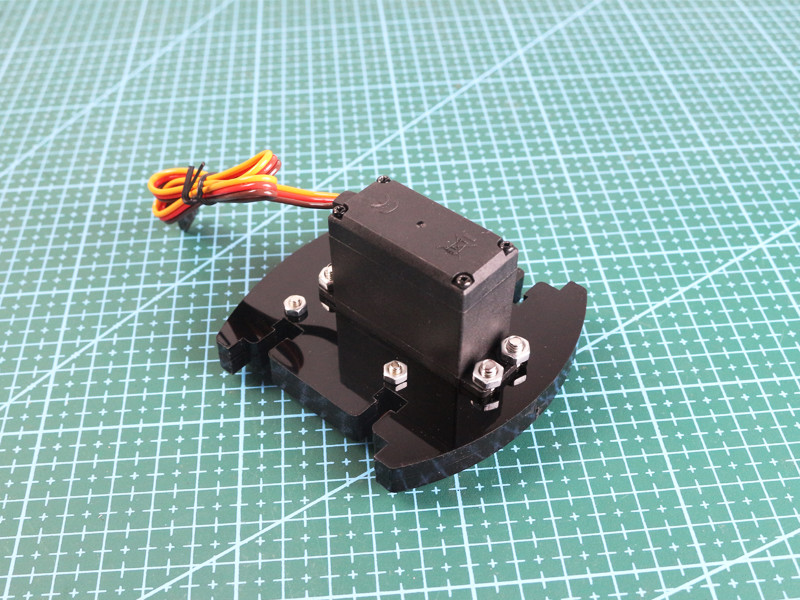
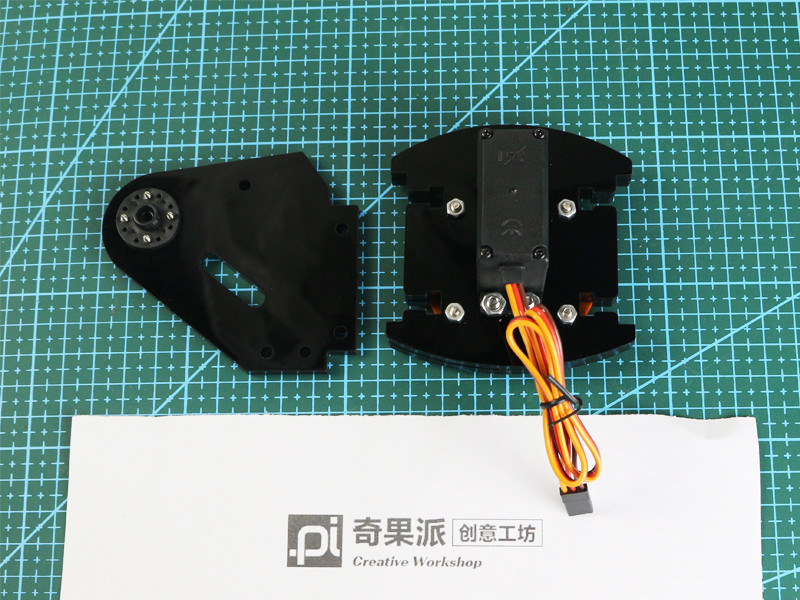
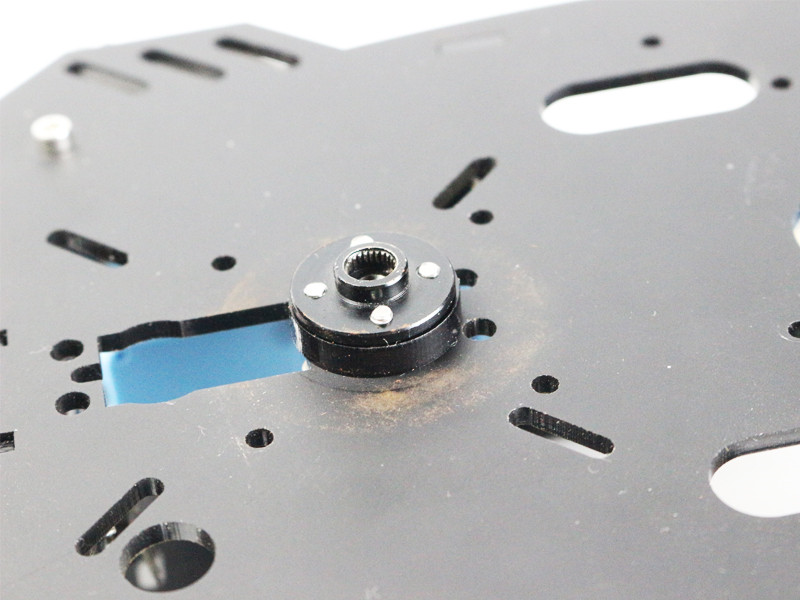
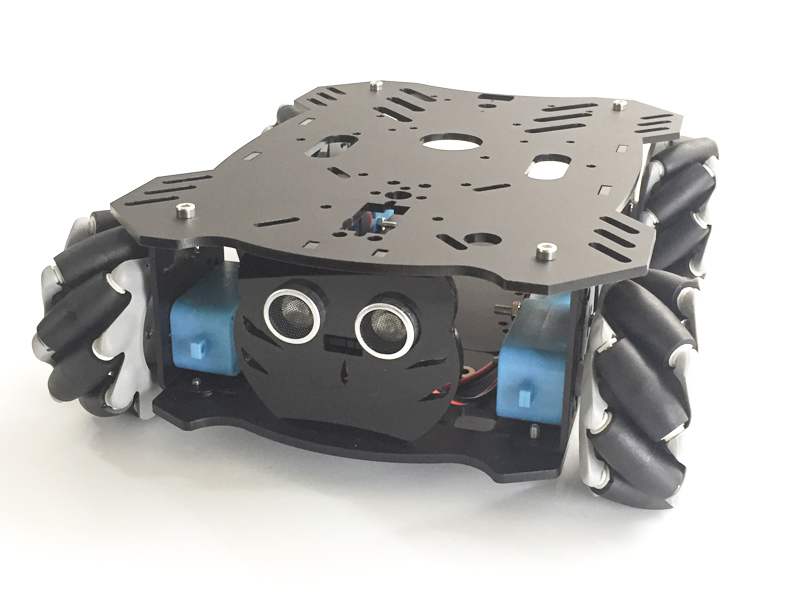
安装底座
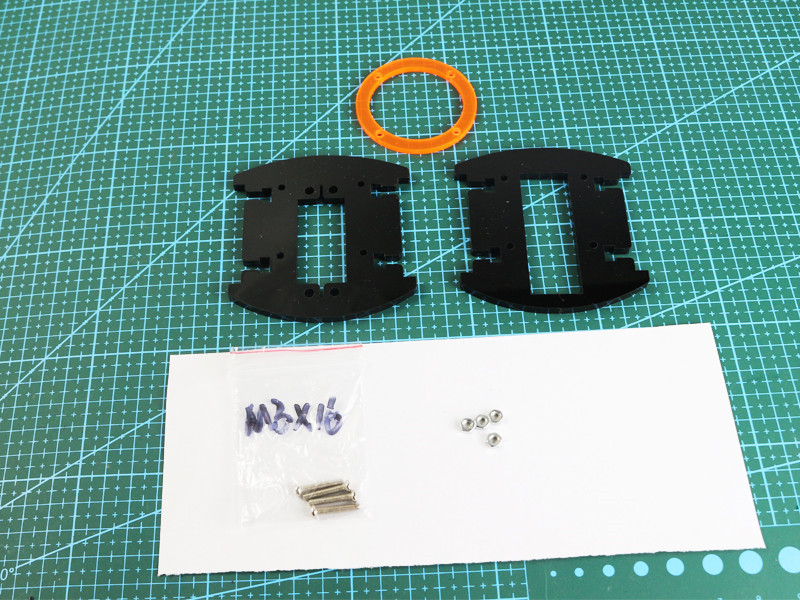
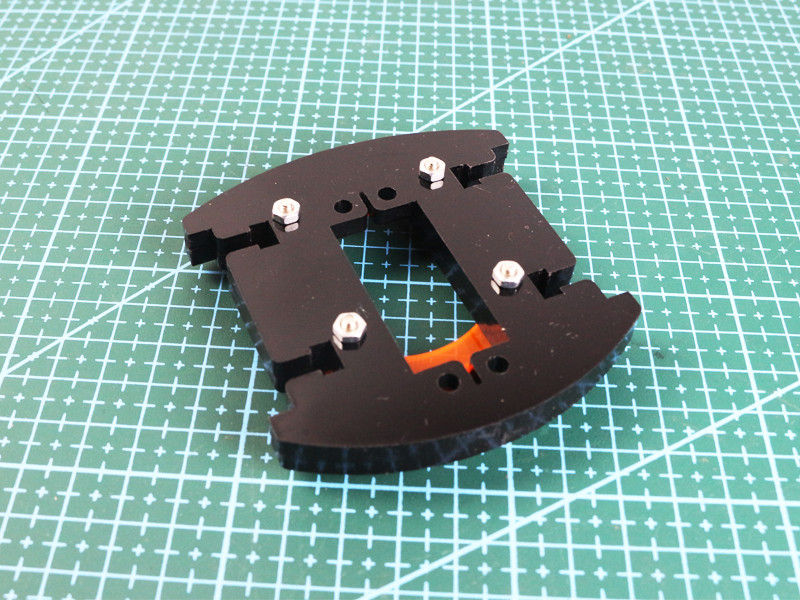
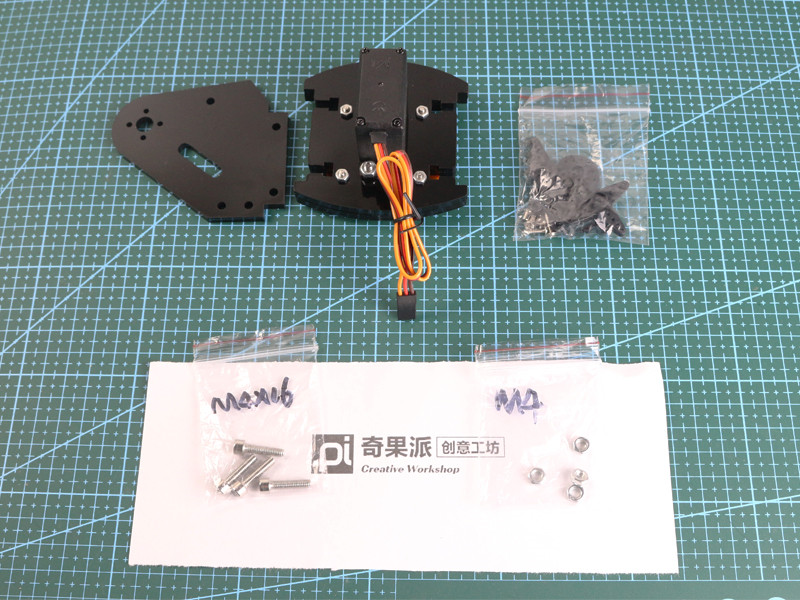
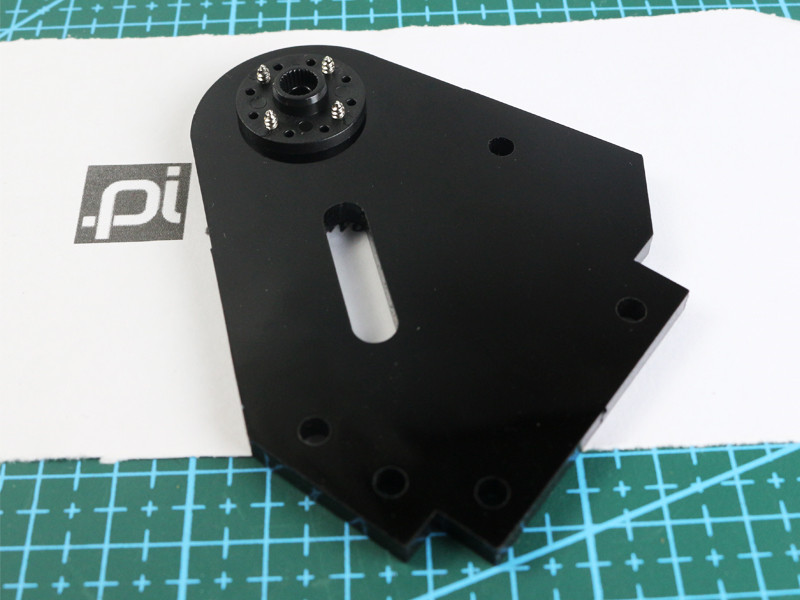

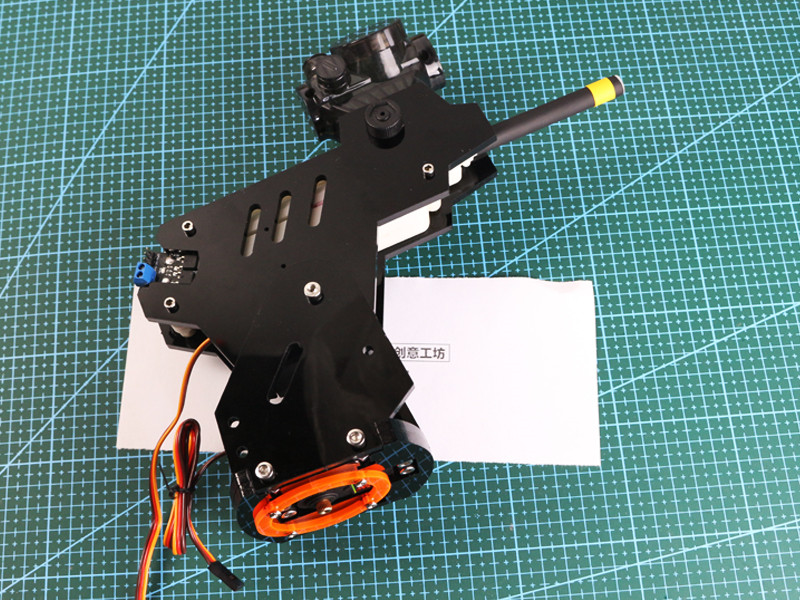


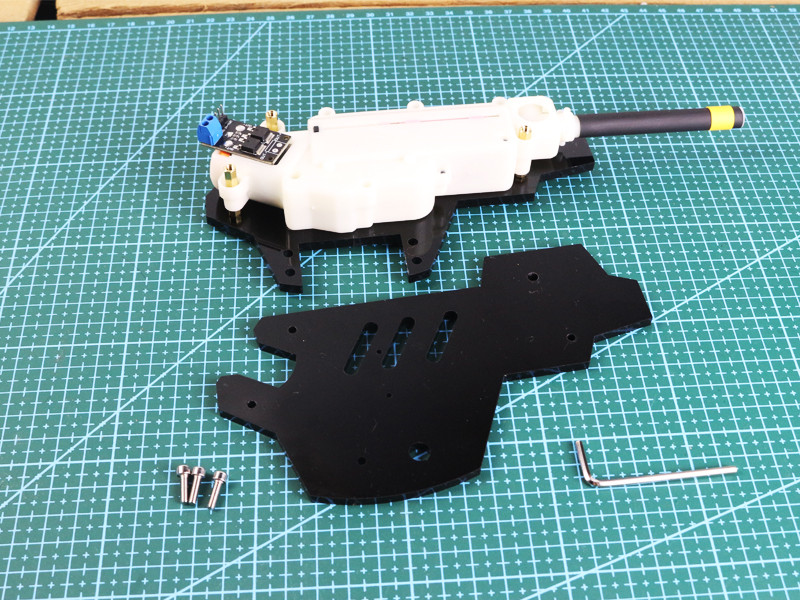
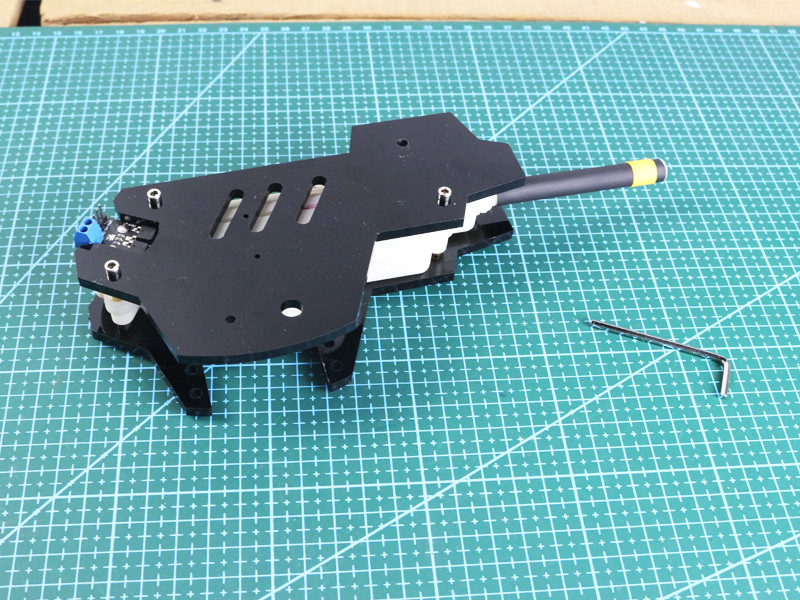
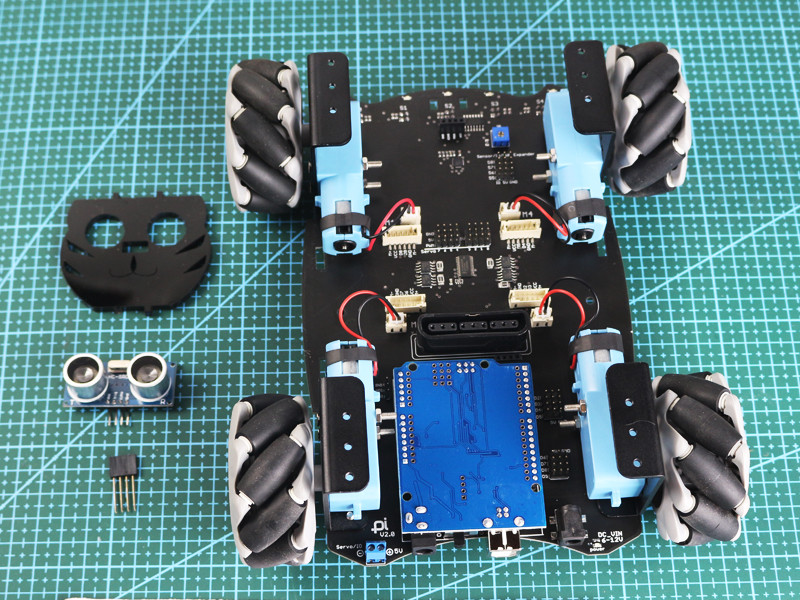
底盘安装
麦克纳姆轮车架底盘安装请访问以上链接
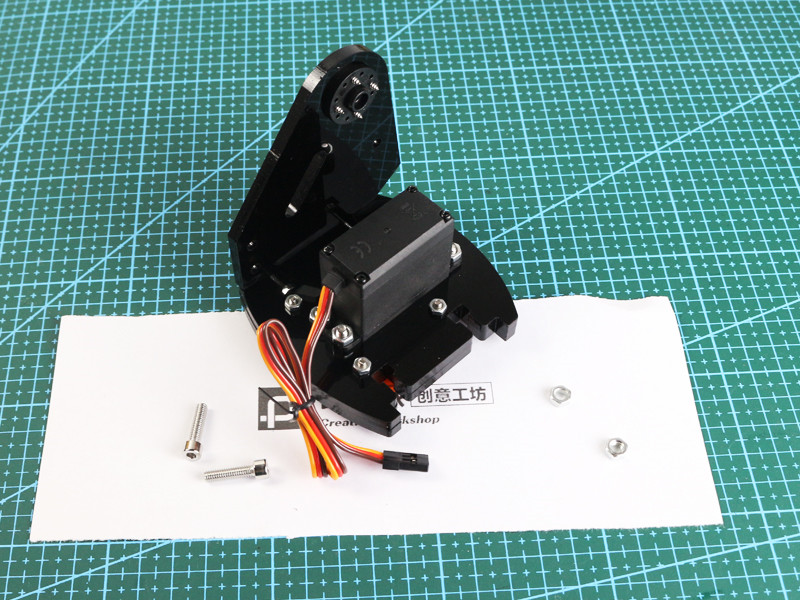
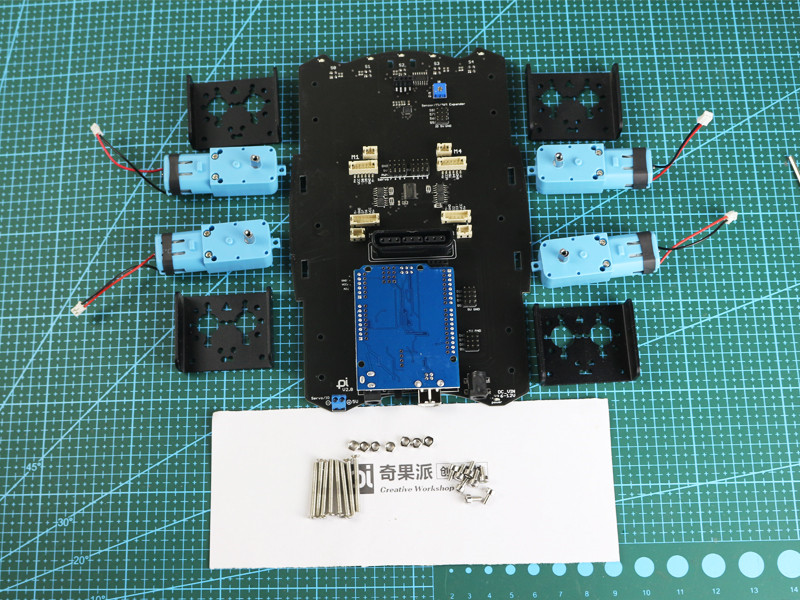
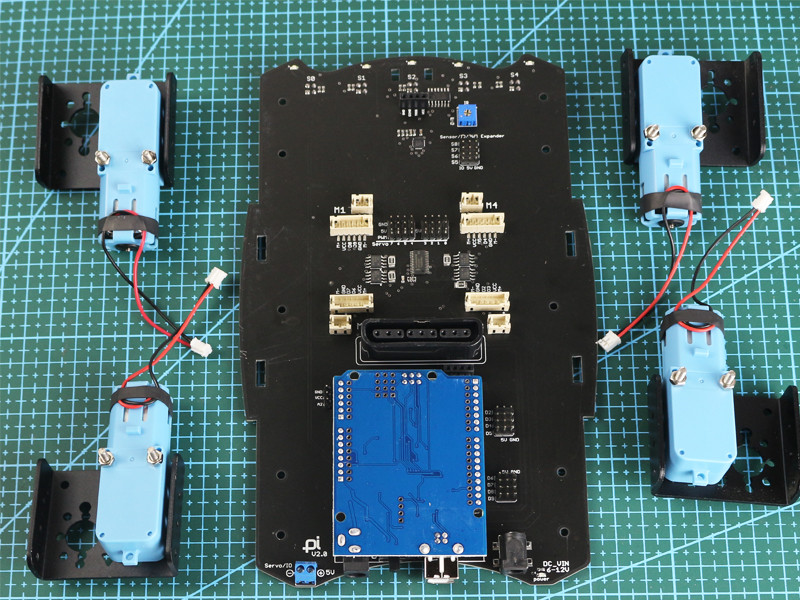
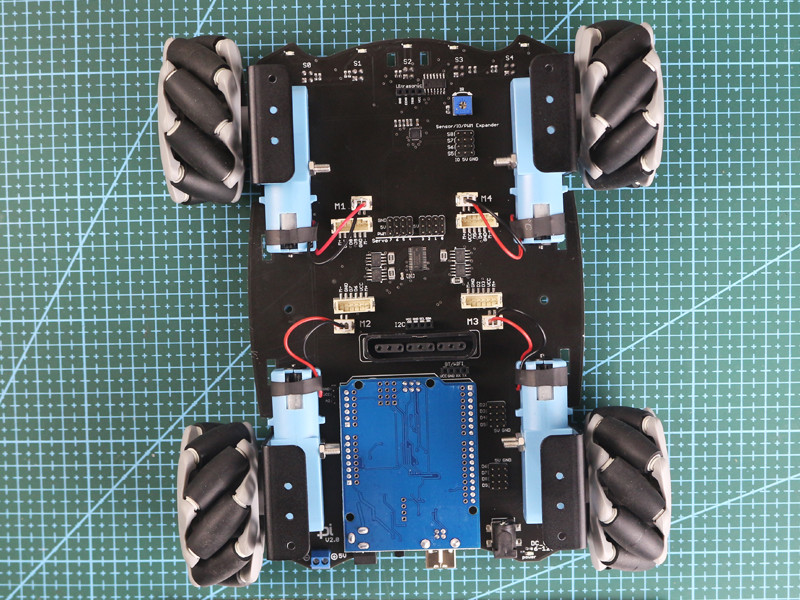
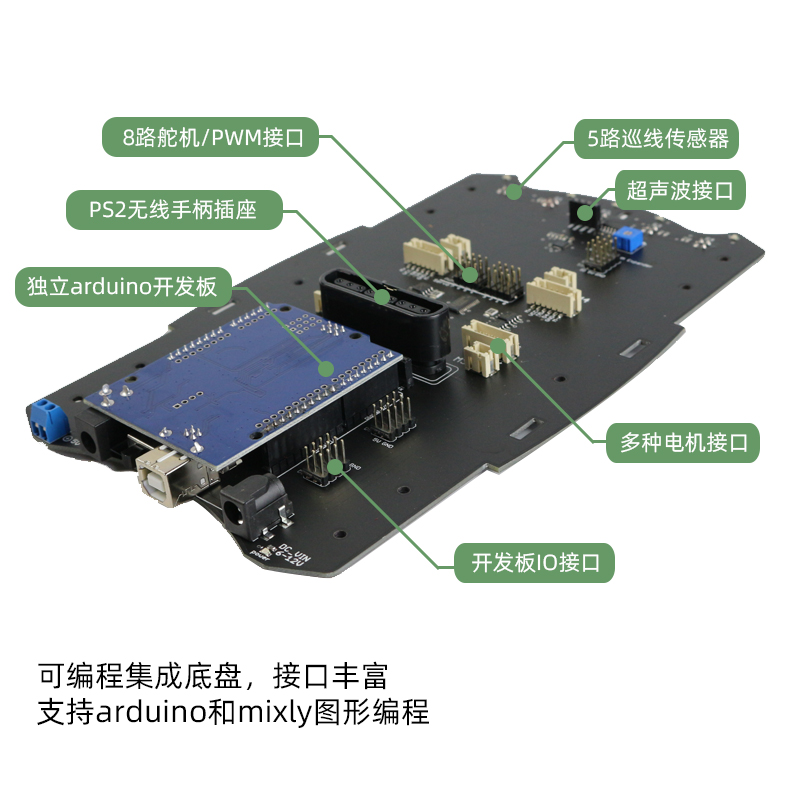
集成版底盘车架的安装
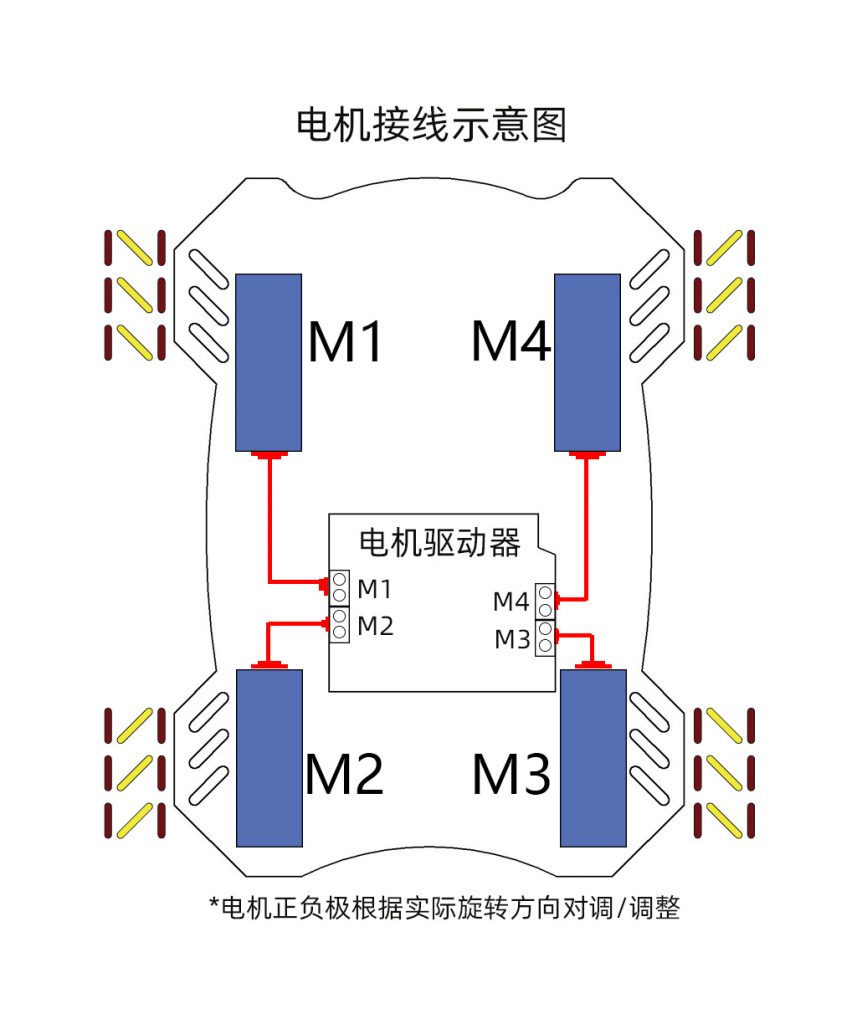

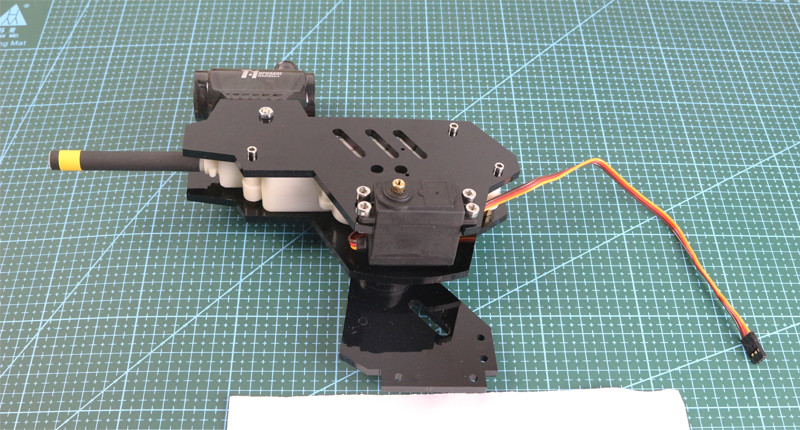
发射器接线注意事项:
- 发射器电流比较大,电源供电功率需要足够大(推荐电压7-9V,输出电流5A以上),供电不足会影响系统稳定。
- 为了方便接线,发射器配有独立供电的接线端子,其中IN+和GND分别和插针的IN+和GND互通,IN+只需要接一个就行,GND需要共地(和PWM需要有回路)
小车固件和程序示例下载
程序下载:麦克纳姆轮S1战车

关于集成底盘的使用说明和程序,请访问以上文章
原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/archives/613