
如果尚未安装机械臂,请先点击以上文章链接,安装机械臂
程序下载:机械臂套件V3.0版资源包
一、简介
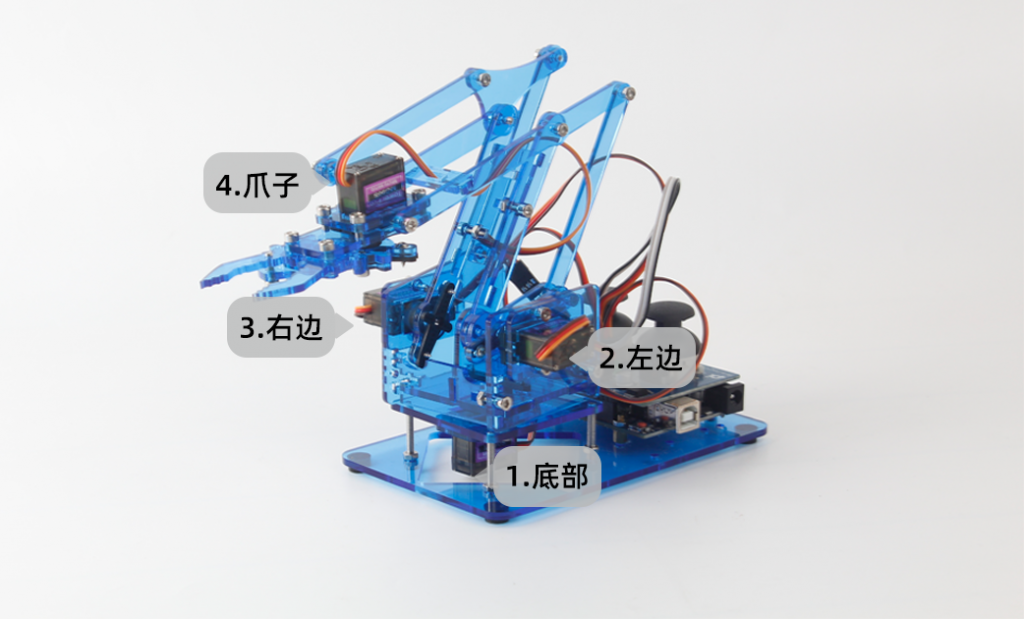
Armbot机械臂学习套件是基于Arduino开发板设计的一套迷你机械臂DIY学习套件。套件配备一套小型机械臂支架和一套基于Arduino编程的双摇杆控制器。
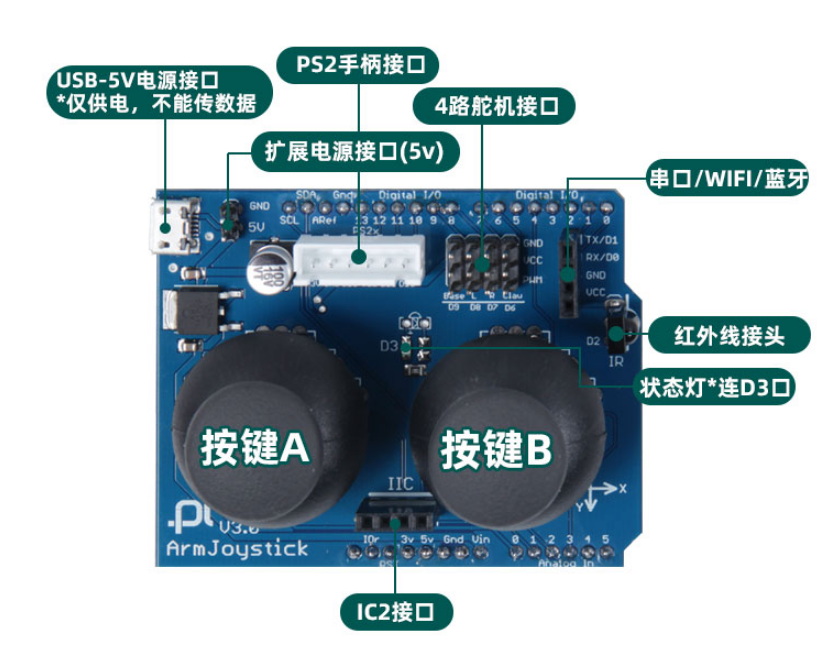
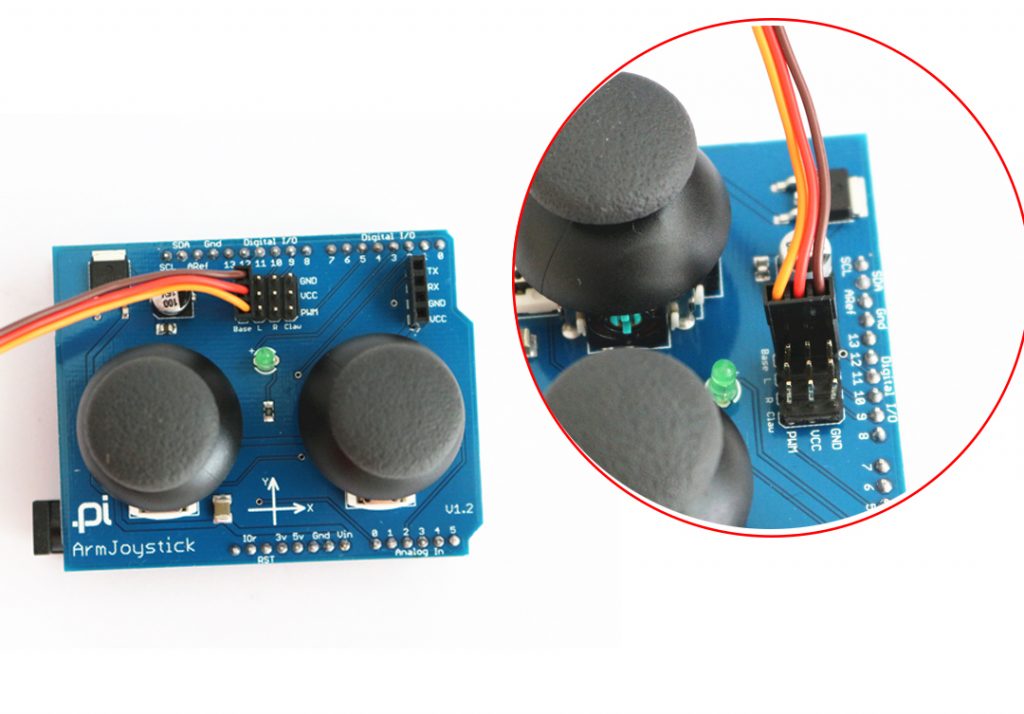
二、双摇杆插件简介
这是适配arduino开发板的一个插件,插件安装有2个摇杆,每个摇杆包含有X,Y两个轴和一个按钮。X,Y的取值范围是(0-1024),静止中间的时候获取的数值是512

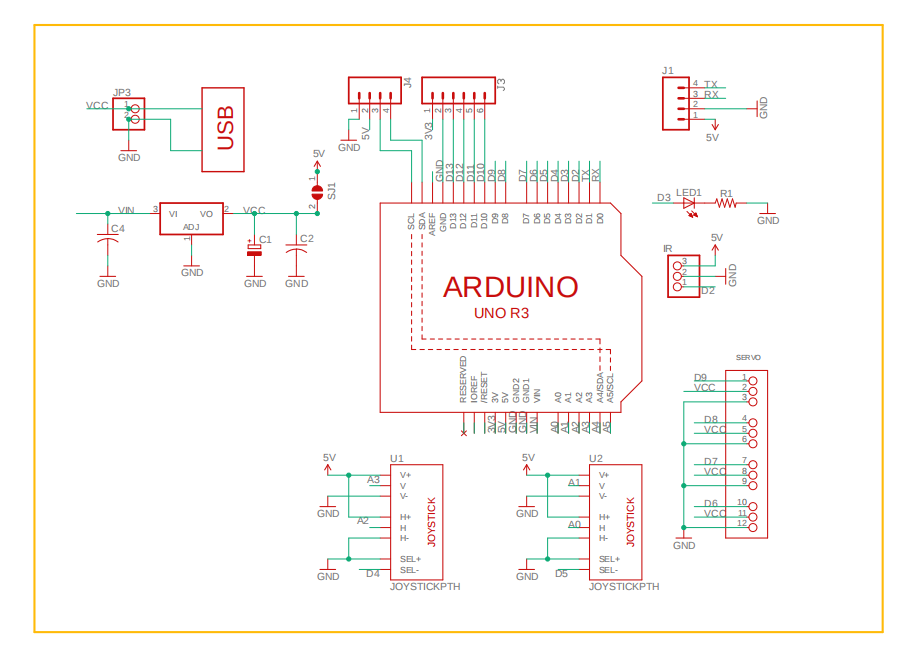
Arduino uno r3开发板原理图:点击下载
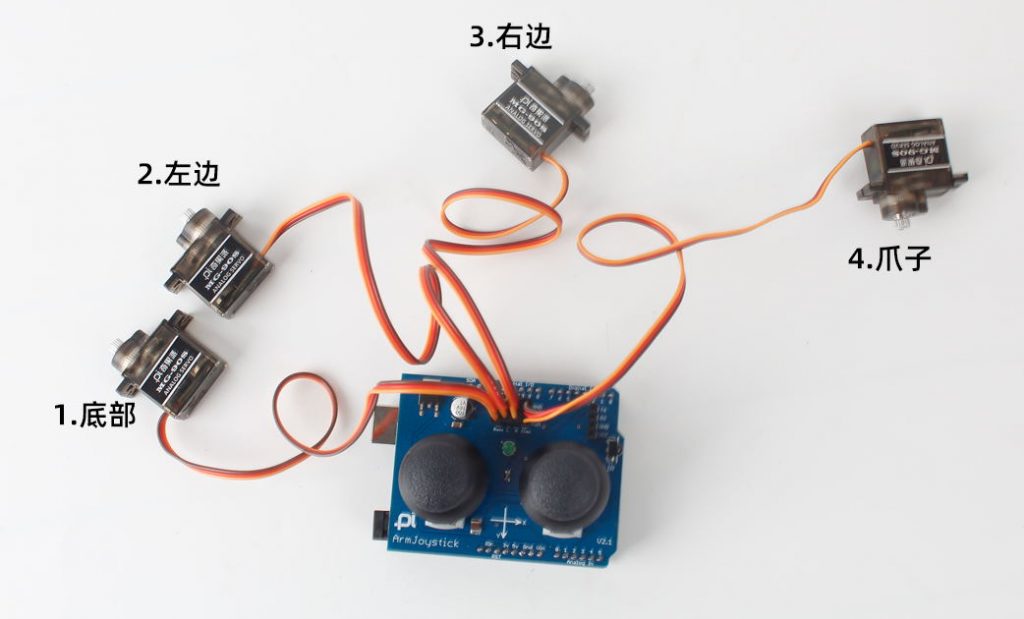
机械臂舵机对应的接口从左到右分别为:底座,左边,右边,爪子。如下图所示:
三、动作录制和回放
Armbot套件开发板自带程序固件。可通过摇杆基本操作以及动作的录制和回放。
动作录制和回放操作说明:
- 通电开机后,默认处于自由操作状态,指示灯常亮,摇杆可自由操控机械臂;
- 长按遥杆左键,遥杆指示灯闪烁,进入录制状态;
- 操控遥杆控制机械臂,到达指定位置按一下遥杆左键,记录当前位置。依次循环操作,直到完成录制;
- 按一下遥杆右键,结束录制。机械臂进入动作回放模式,自动执行记录的动作;
- 按下摇杆左键,退出动作回放模式。机械臂进入默认状态,可自由操作。
四、软件编程
1.基于Arduino编程
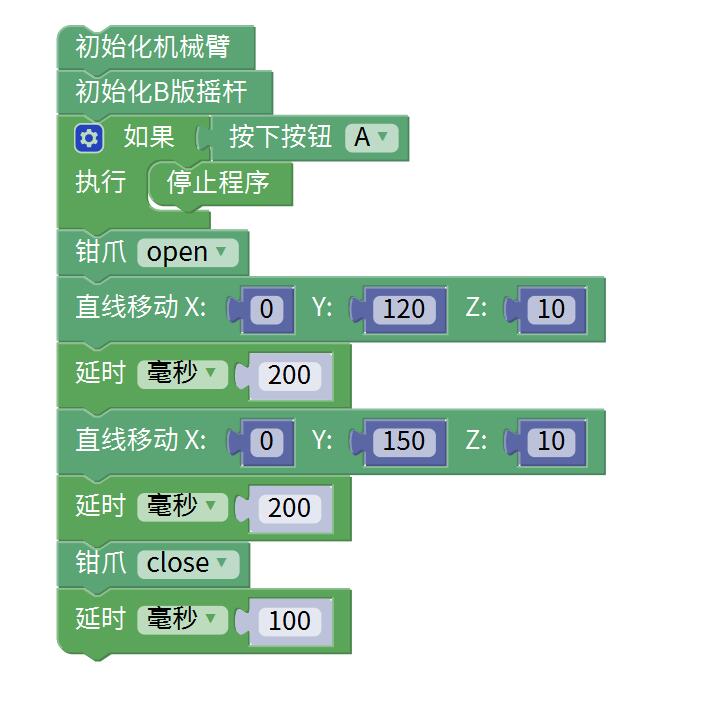
2.基于Mixly的图形编程
原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/archives/269