奇果派开发插件:机械臂开发插件rc4
程序下载:示例代码
错误处理
如果出现MsTimer2文件无法找到的错误,可以按下方步骤处理
1.首选项查看项目文件夹啊地址

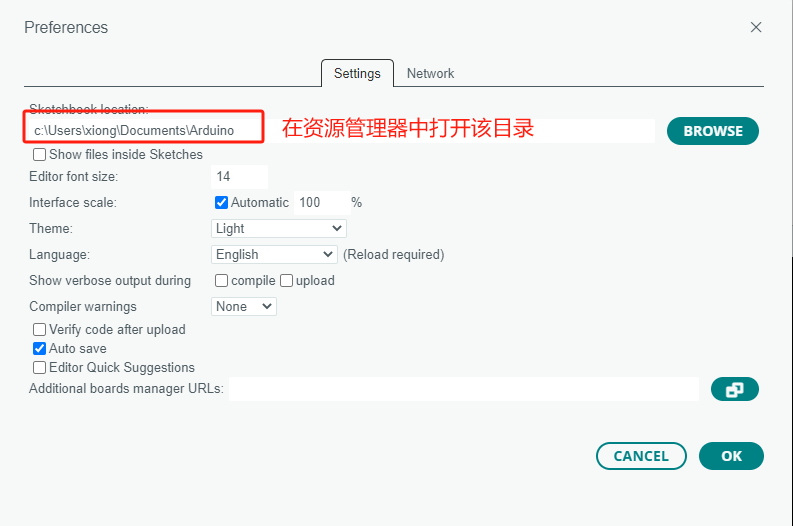
2.把示例文件夹下的libraries文件夹,拷贝至上图的目录下
3.删除示例代码下的MsTimer2.h 和 MsTimer2.cpp文件
原创文章,作者:奇果派,如若转载,请注明出处:https://www.7gp.cn/archives/1198

奇果派开发插件:机械臂开发插件rc4
程序下载:示例代码
如果出现MsTimer2文件无法找到的错误,可以按下方步骤处理
1.首选项查看项目文件夹啊地址
2.把示例文件夹下的libraries文件夹,拷贝至上图的目录下
3.删除示例代码下的MsTimer2.h 和 MsTimer2.cpp文件
原创文章,作者:奇果派,如若转载,请注明出处:https://www.7gp.cn/archives/1198
《MEARM机械臂安装教程》 如果尚未安装机械臂,请先点击以上文章链接,安装机械臂 一、简介 Armbot机械臂学习套件是基于Arduino开发板设计的一套迷你机械臂DIY学习套件…
一.初识摇杆 如下图,左右两个摇杆,分别可以上下左右拨动,也可以按下当按钮使用。 因此摇杆A可以向开发板传递三个信号:左右、上下 和 是否按下。 通过下方原理图看出: 左右两个摇杆…
我们将在这里介绍最新版机械臂的安装方法。这个版本的机械臂经过多次更新和改良,结构更加合理。适合用于机械和电子方面的入门学习、也可以作为毕业论文设计的材料。 Step 1: 对舵机进…
一.扩展版 下图是机械臂的扩展板,请直接插在Arduino开发板上,4个舵机线插在【4路舵机接口】 二.原理图 下方是原理图,扩展版所有接口最终都是连接至Arduino开发板 新入…