
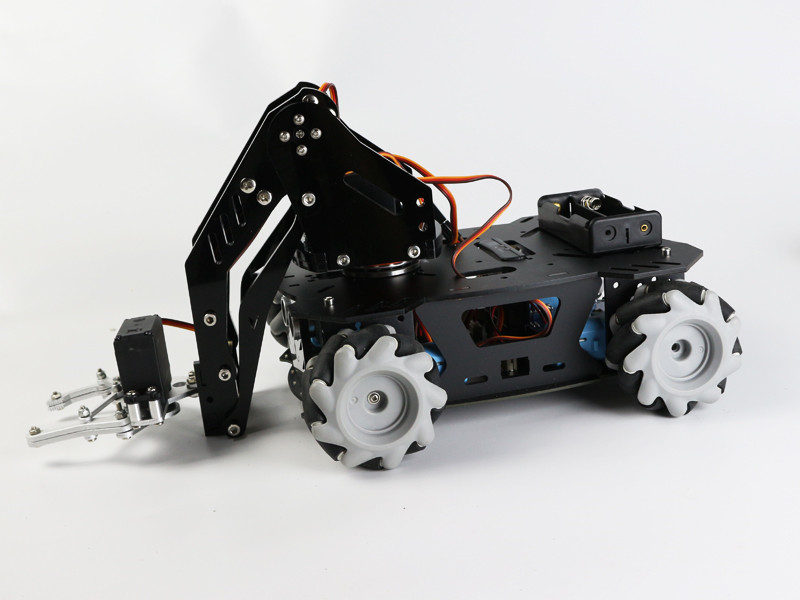
准备
安装机械臂之前,要调整舵机初始角度,否则会影响机械臂活动范围或者卡死。套件提供的舵机运行范围是0-180度,初始角度处于居中(90度)即可。
*舵机长时间堵转(卡死)增加功耗发热,严重的会烧坏舵机或者控制板。
参考方法:将集成底盘通电开机,将所有舵机依次插入舵机5号端口,舵机会复原到90度位置。
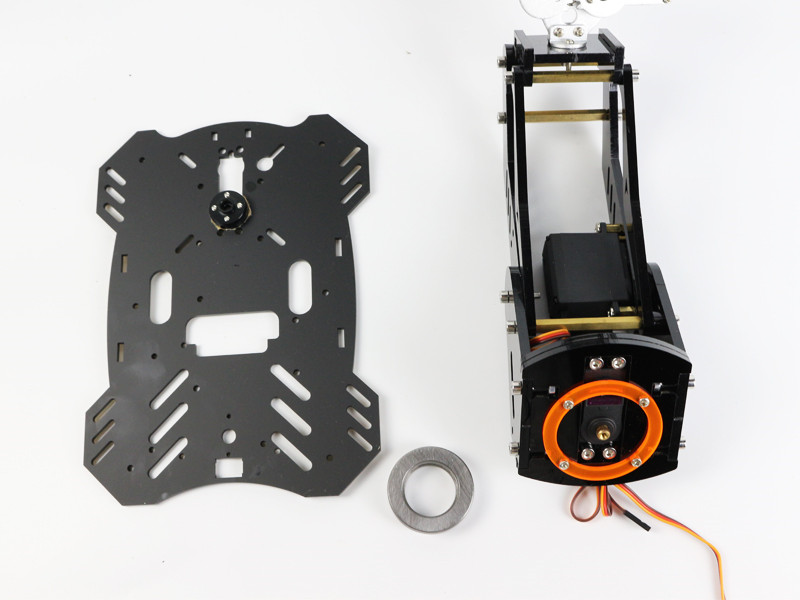
安装底座



将底座两片板子重叠 
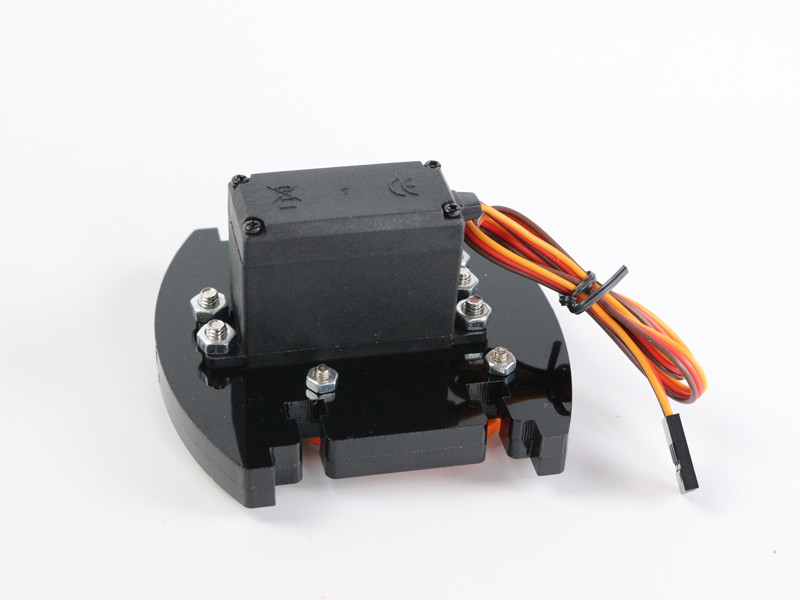
将橙色圆环安装到底座下层,并用螺丝固定 
安装左侧舵机圆盘 
准备安装底座舵机
固定底座螺丝

使用M4x12螺丝固定舵机 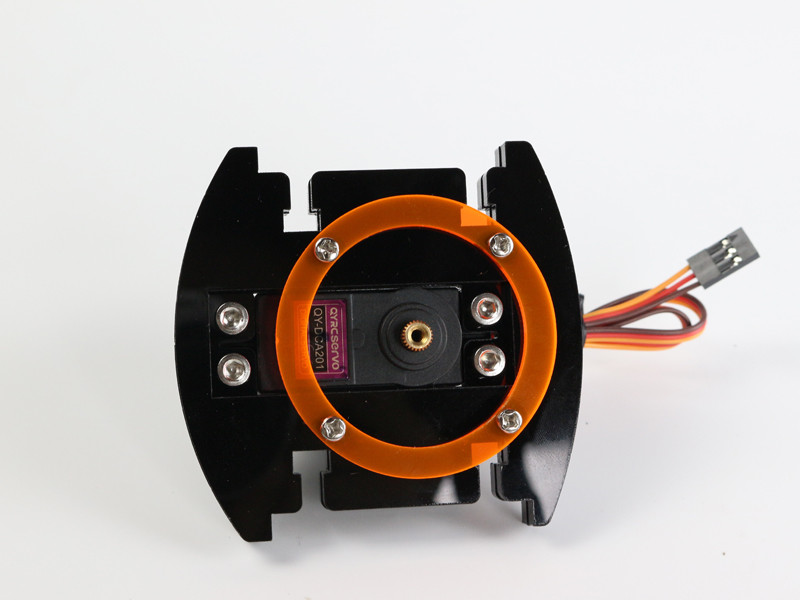
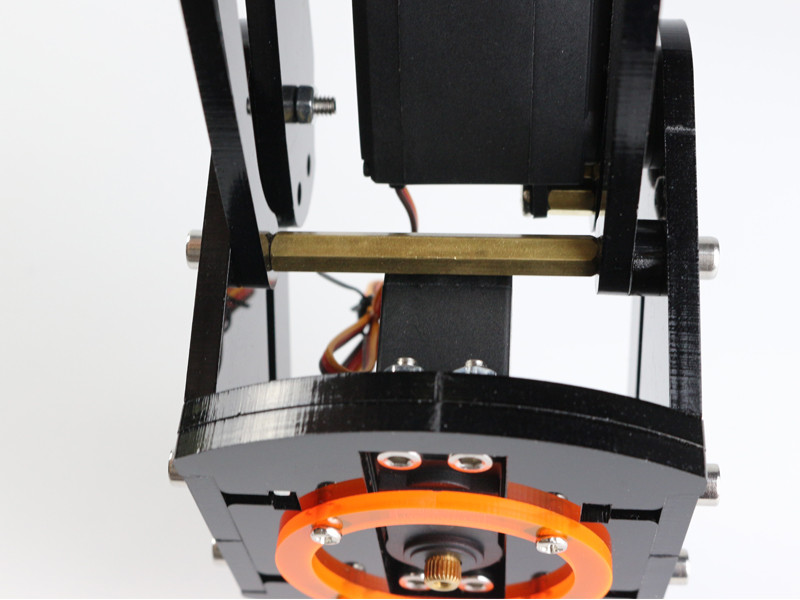
注意观察舵机轴正好是橙环的圆心


M4x16螺丝固定侧边
安装左侧摇臂


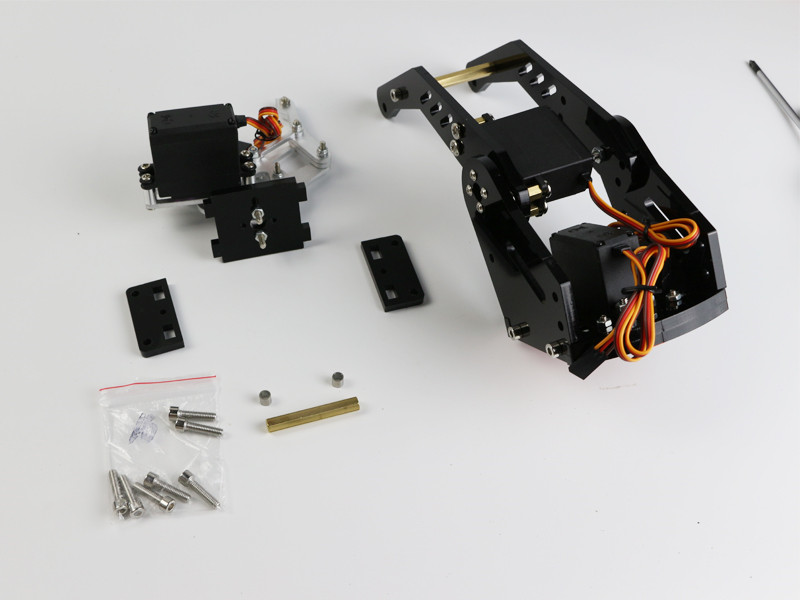
使用M4x8螺丝固定铜柱 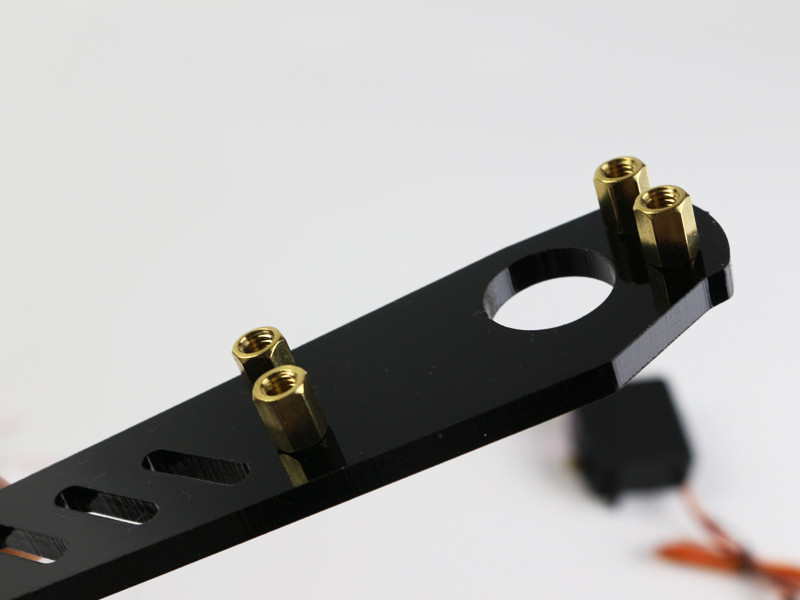
M4x8铜柱 
M4x8十字螺丝 
M4x6螺丝固定舵机
安装右侧摇臂


摇臂关节安装轴套 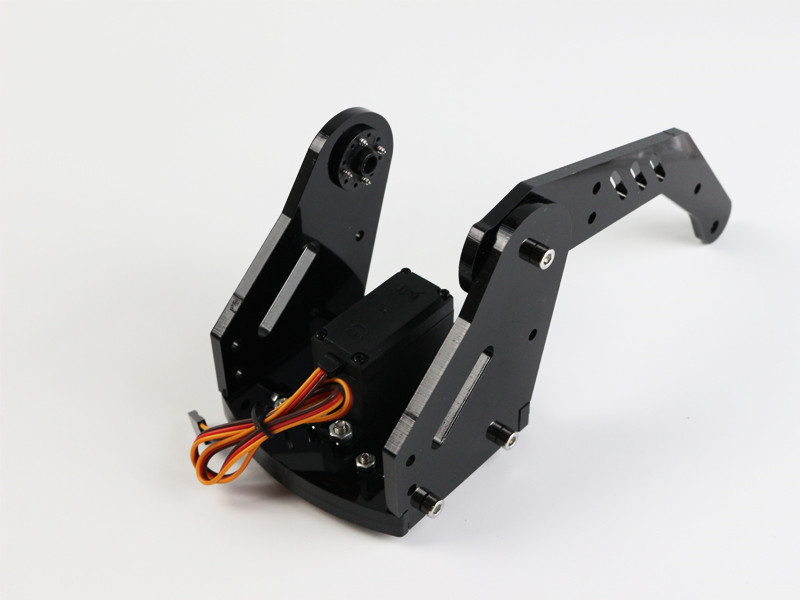

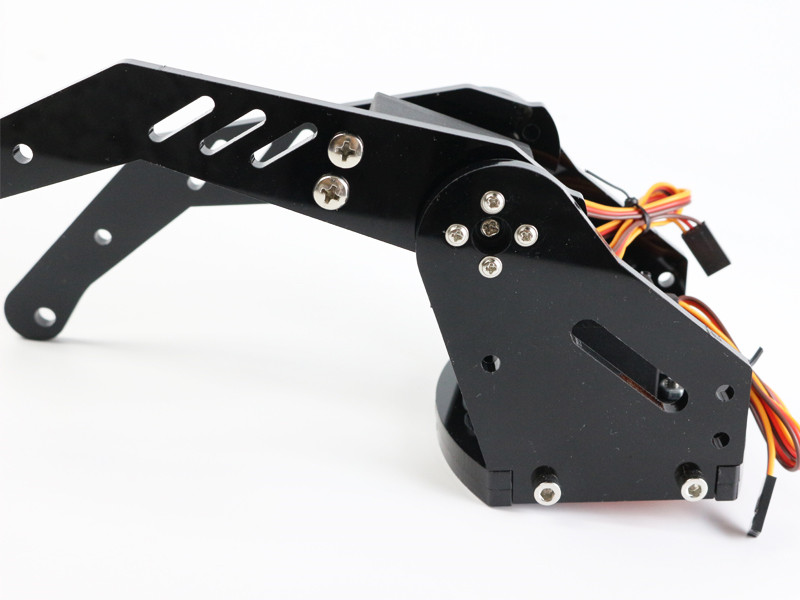
注意摇臂角度,以免上下摇摆被卡主

用铜柱固定两个摇臂 
安装机械爪
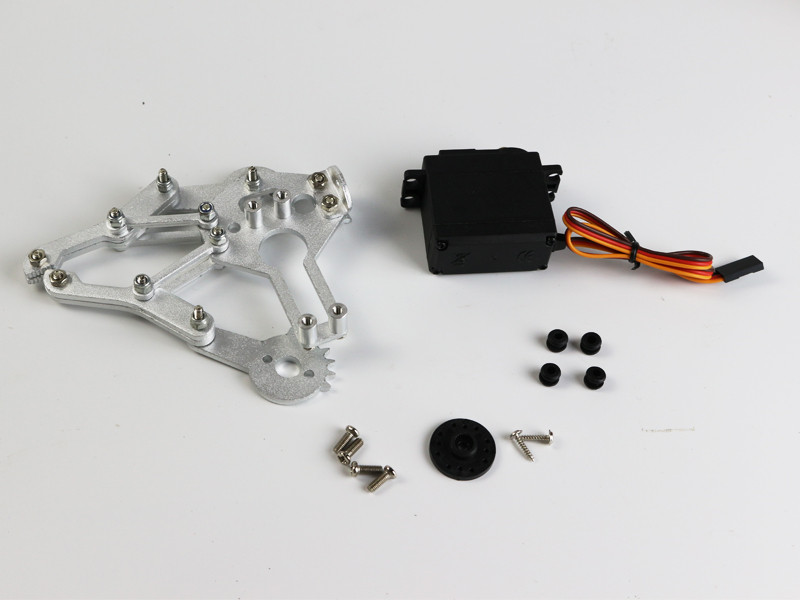

安装舵盘 
舵机4个孔位卡主胶圈 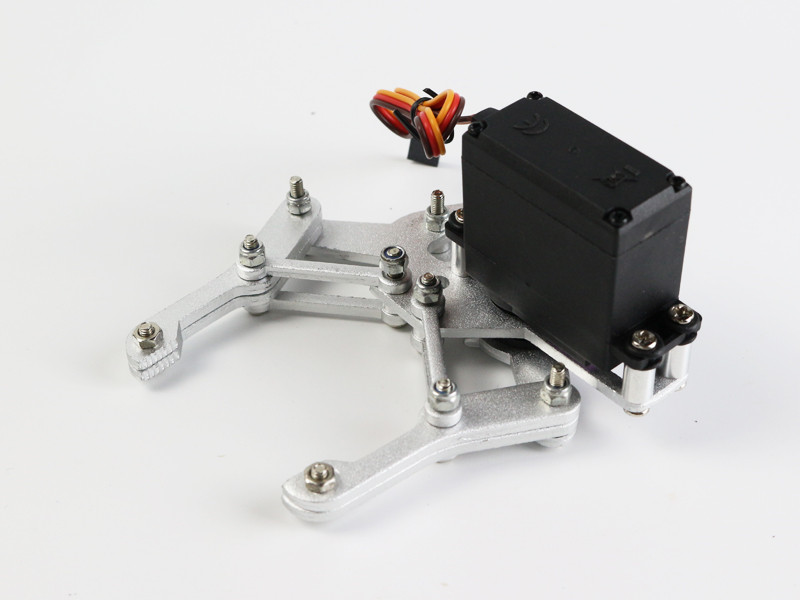
固定舵机 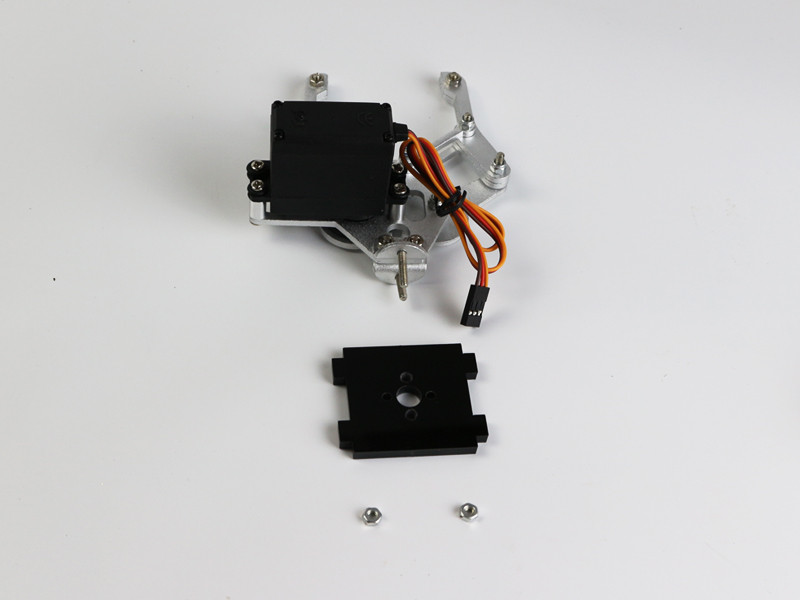
安装机械爪 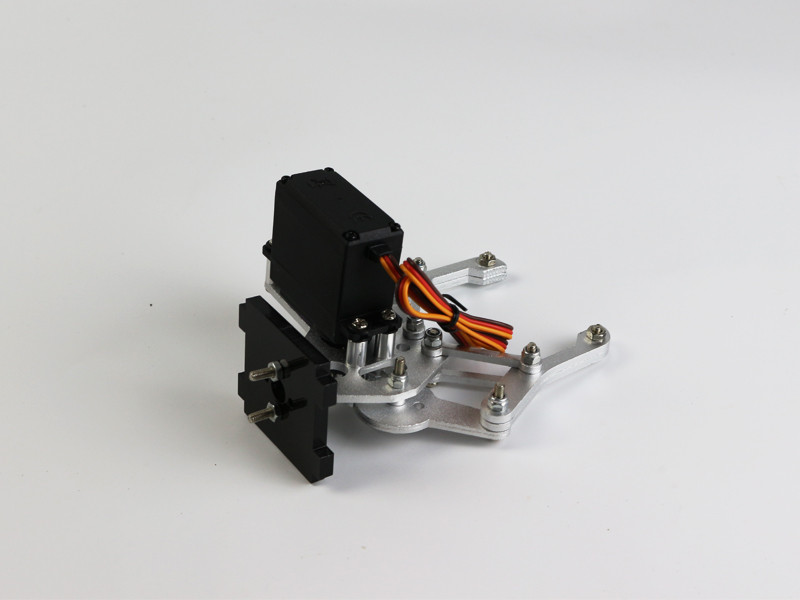
安装头部和连杆

连杆4个孔位都放入轴套 
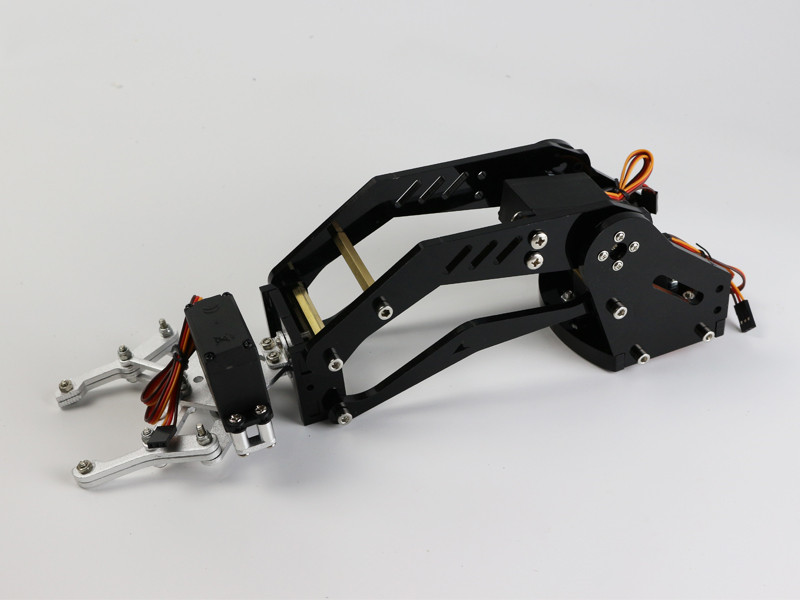
安装腰部轴承

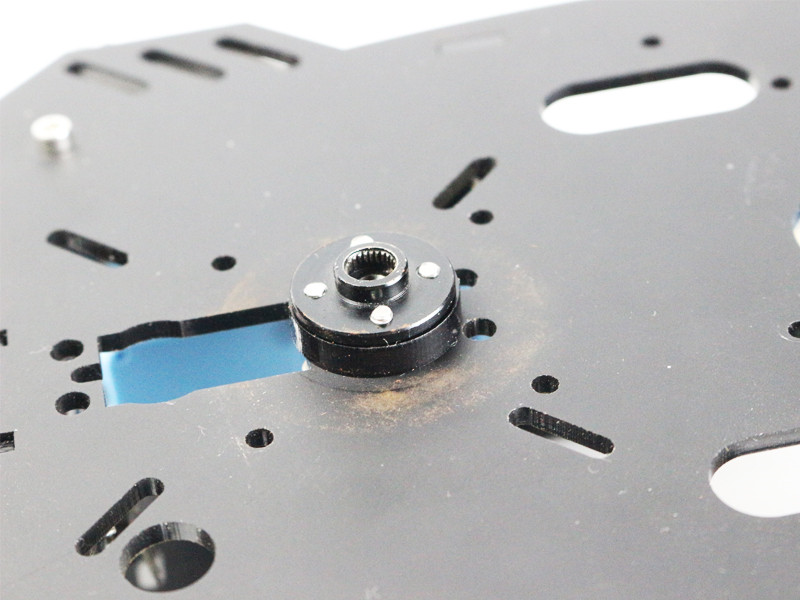
底座层板先安装好舵盘 
卡入轴承,然后从底部拧住舵机轴螺丝
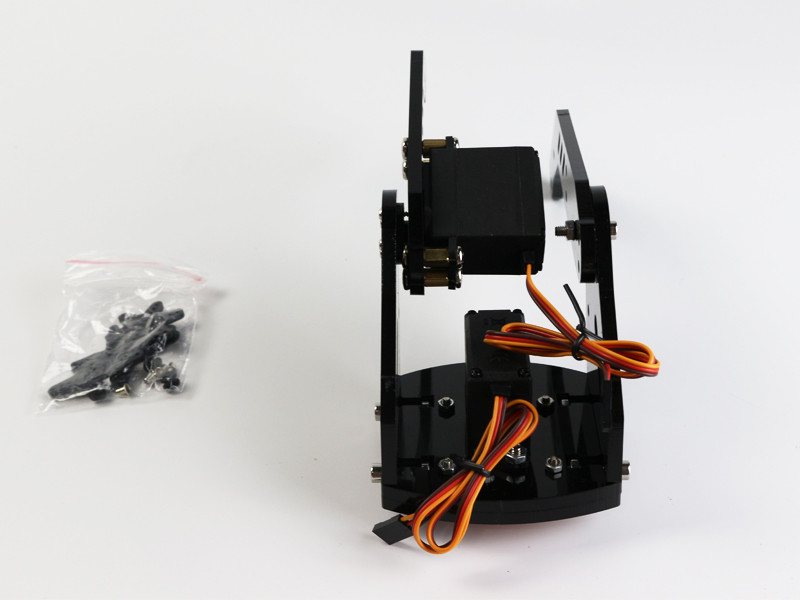
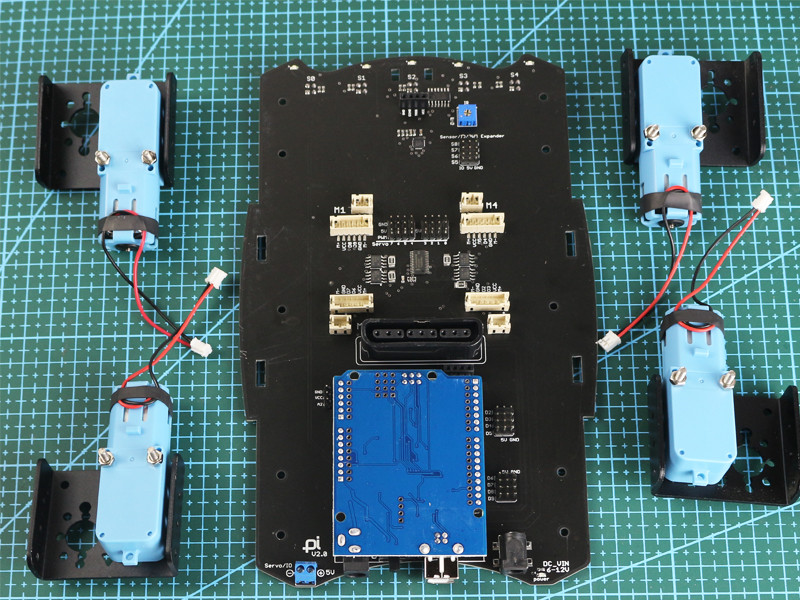
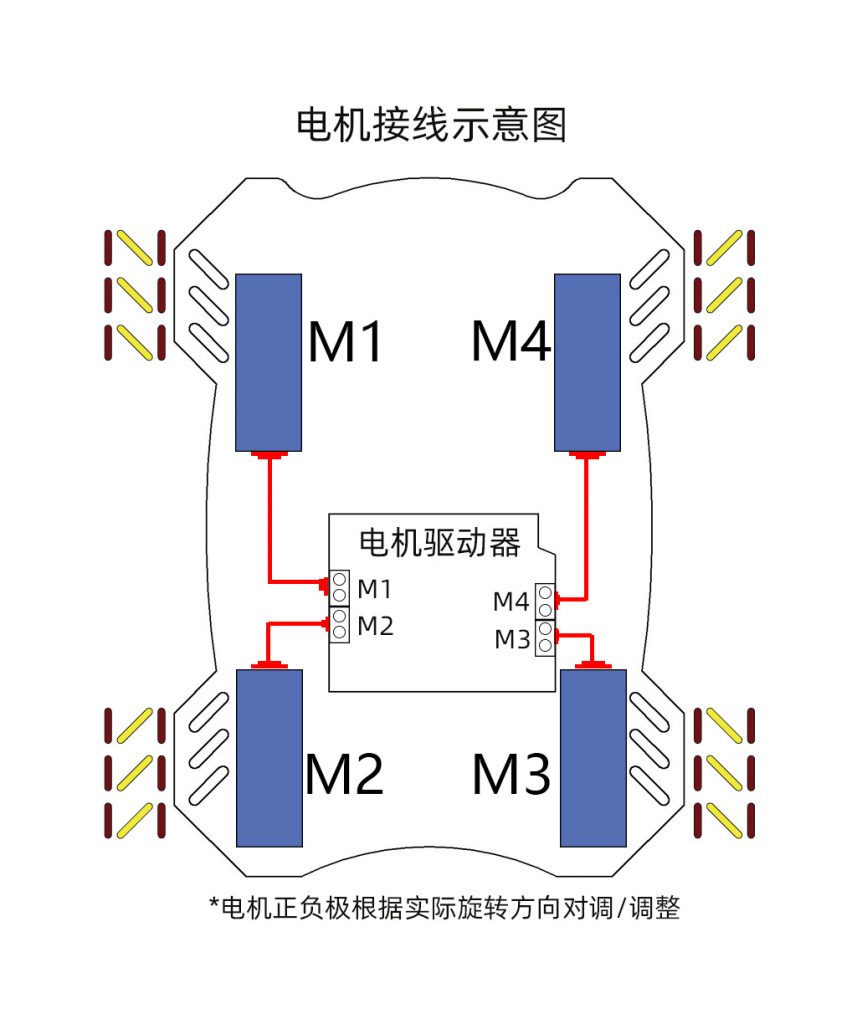
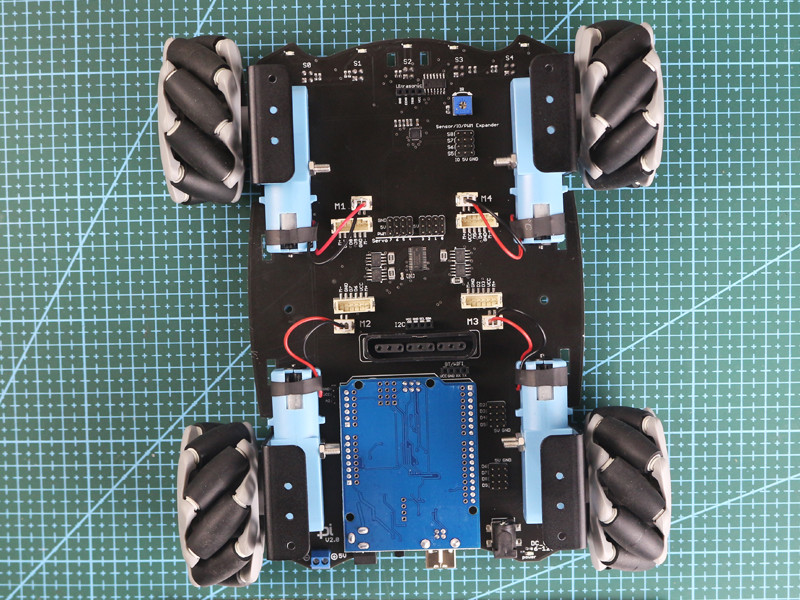
机械臂舵机插线和底盘安装

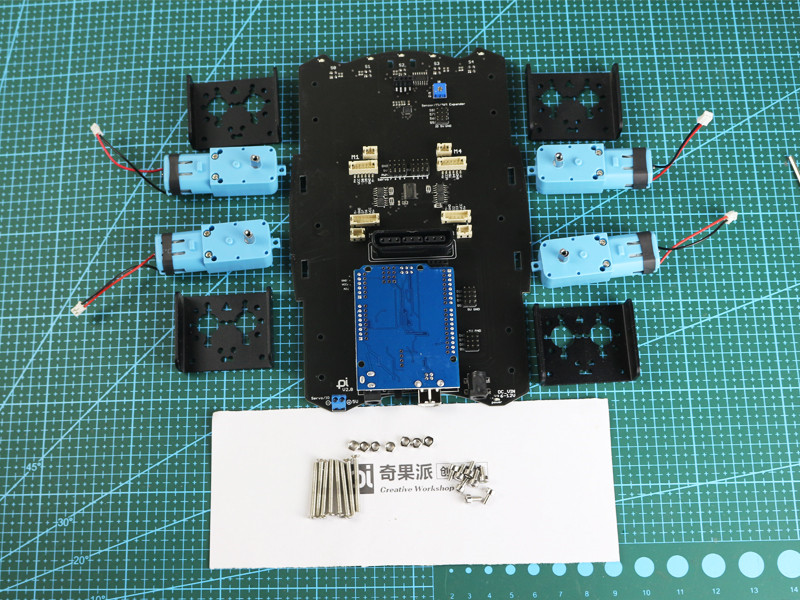
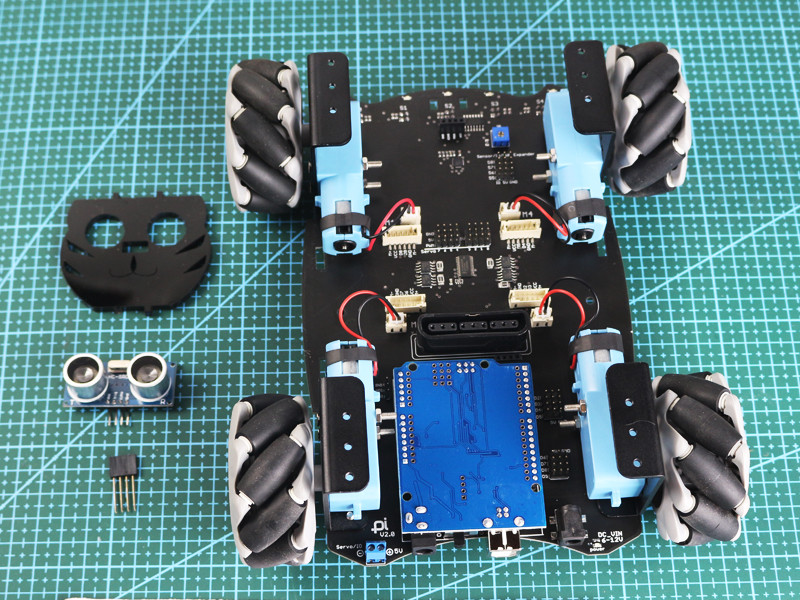
小车固件和程序示例下载
麦克纳姆轮小车程序下载:点击下载

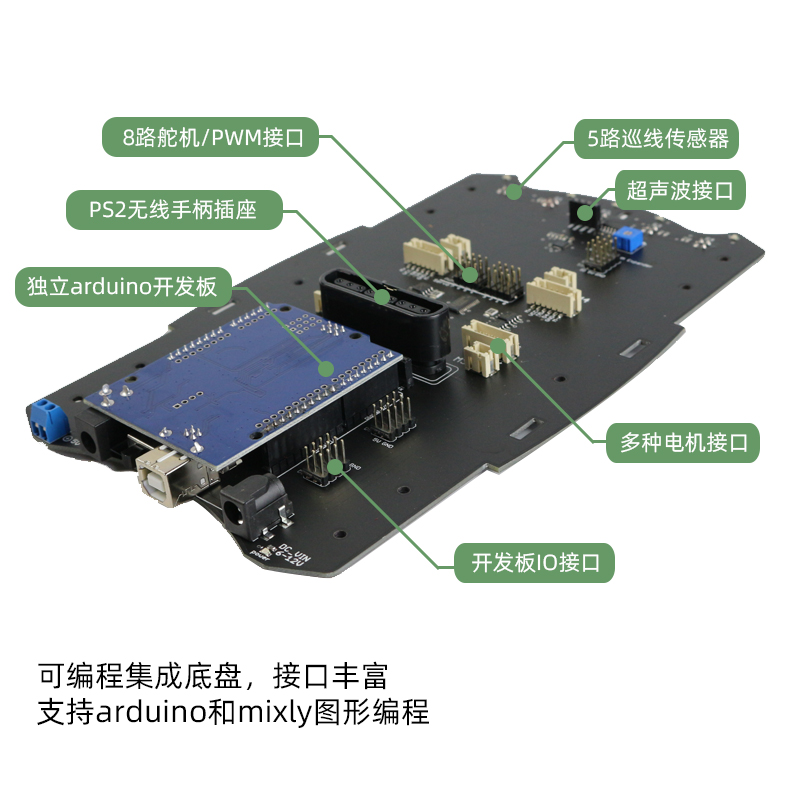
关于集成底盘的使用说明和程序,请访问以上文章
原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/archives/609