
原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/archives/687

原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/archives/687
【奇果派】视频遥控小车安装教程-带4G模块 点击查看开发板资料 下载App 目前仅支持安卓版App 4G版-步骤1: 配对车子 如购买的是4G版套餐,发货清单会有一个4G通讯模组,…
安装发射器 安装底座 底盘安装 《麦克纳轮V2底盘安装》 麦克纳姆轮车架底盘安装请访问以上链接 集成版底盘车架的安装 发射器接线注意事项: 发射器电流比较大,电源供电功率需要足够大…
示例程序下载:点击下载 电机驱动器详细资料请访问:《Arduino MotorShiled电机驱动器说明》
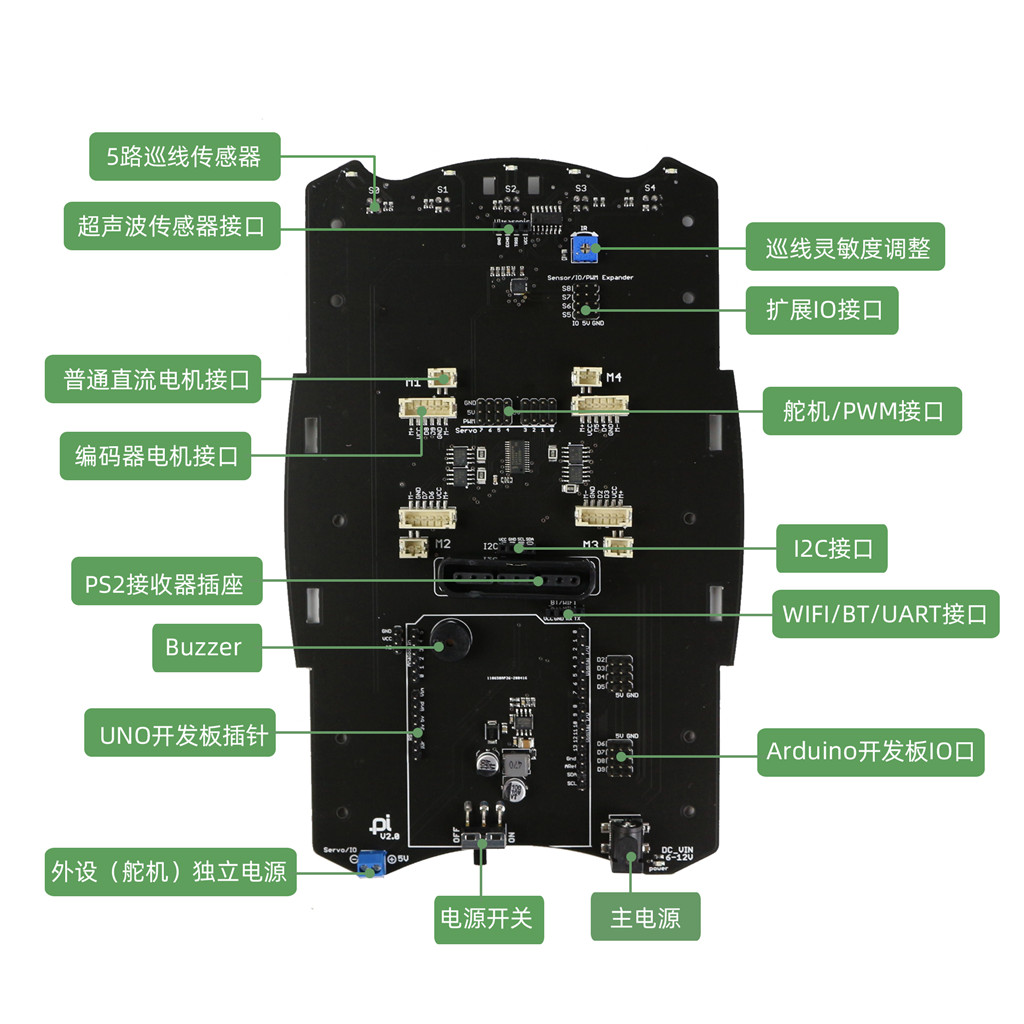
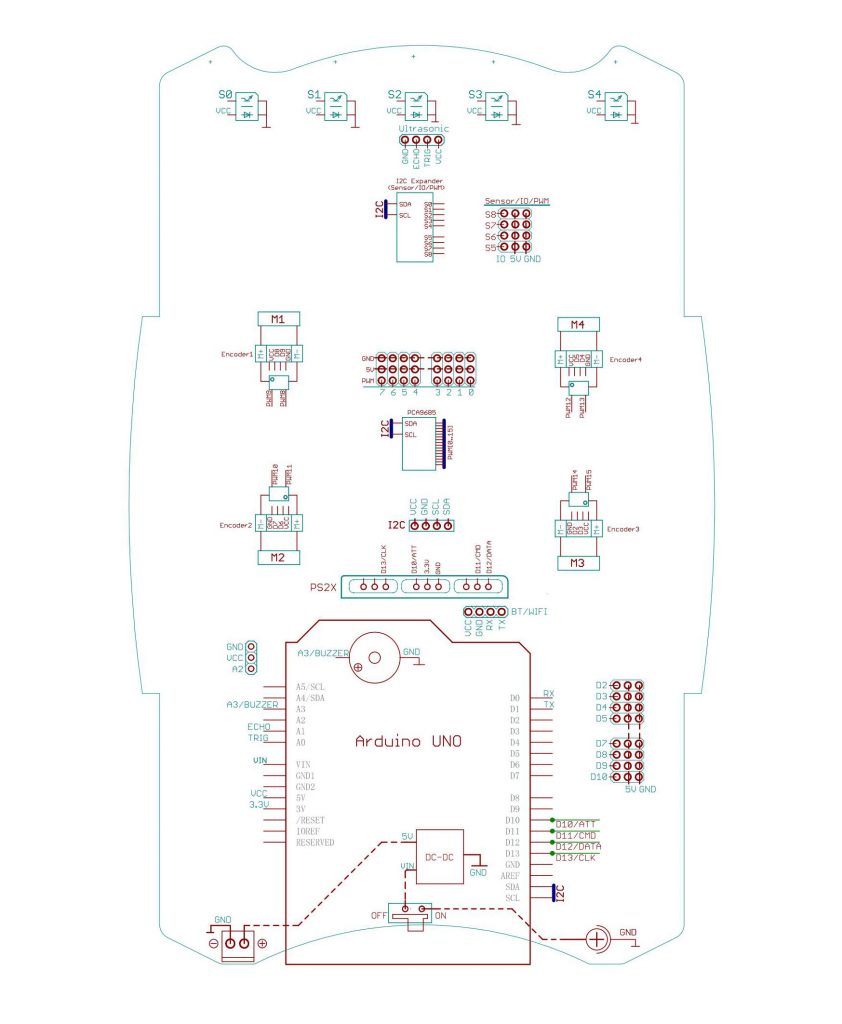
该线路板是奇果派自研的一款电机驱动扩展解决方案,可以驱动4个直流电机或2个步进电机,并且额外提供8路全速PWM控制,可以控制8路舵机。
程序下载:Arduino巡线示例代码 《MEARM机械臂安装教程》 小车机械臂安装机手册,请访问以上文章链接,安装机械臂。机械臂无需底座,可从Step 4开始。 《麦克纳姆轮小车V…
MotorShiled V1-V3程序下载
什么是Arduino Arduino是全球流行的开源硬件,也是一个优秀的硬件开发平台。落实到具体,就是一个开发环境【软件】(Arduino IDE)和一块单片机开发板(常用的Ard…
本文重点讲述如何使用micro-ROS技术让Esp32和Ros2之间进行通讯,并提供了一个双向通讯的示例代码供大家参考,后期可以在此基础上完善esp32的电机控制、ros2的智能控…
一、概述 这是基于树莓派制作运动机器人非常完美的解决方案,这款电机驱动器足够强大,可以驱动4个直流电机或2个步进电机,并且额外提供4路全速PWM控制,可以控制4路舵机。自带稳压电路…
一、概述 用Arduino类库驱动舵机并不是一件难事,如果需要驱动很多电机,就需要要占用更多的引脚,也会影响到Arduino的处理能力。专门的舵机驱动板很好的解决了这个问题。 此舵…