原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/b07

示例程序下载:点击下载 电机驱动器详细资料请访问:《Arduino MotorShiled电机驱动器说明》
《MEARM机械臂安装教程》 如果尚未安装机械臂,请先点击以上文章链接,安装机械臂 一、简介 Armbot机械臂学习套件是基于Arduino开发板设计的一套迷你机械臂DIY学习套件…
安装发射器 安装底座 底盘安装 《麦克纳轮V2底盘安装》 麦克纳姆轮车架底盘安装请访问以上链接 集成版底盘车架的安装 发射器接线注意事项: 发射器电流比较大,电源供电功率需要足够大…
一. 准备器材 1.ps2无线手柄,某宝购入(建议买带插针的,直接接的貌似干扰比较强) 2.arduino UNO板,某宝购入 3.杜邦线(母对母)若干,某宝购入 4.转接板(选购…
一.初识摇杆 如下图,左右两个摇杆,分别可以上下左右拨动,也可以按下当按钮使用。 因此摇杆A可以向开发板传递三个信号:左右、上下 和 是否按下。 通过下方原理图看出: 左右两个摇杆…
第一步:下载安装APP tip:暂时只发布安卓版app 第二步:手机连接摄像头热点 摄像头开机后会开启名为”IPC_XXX“的热点,手机连接该热点 第三步:配置摄像头 下图是摄像头…
此篇文章主要介绍如何使用米思奇图形化编程的插件下载、安装和使用
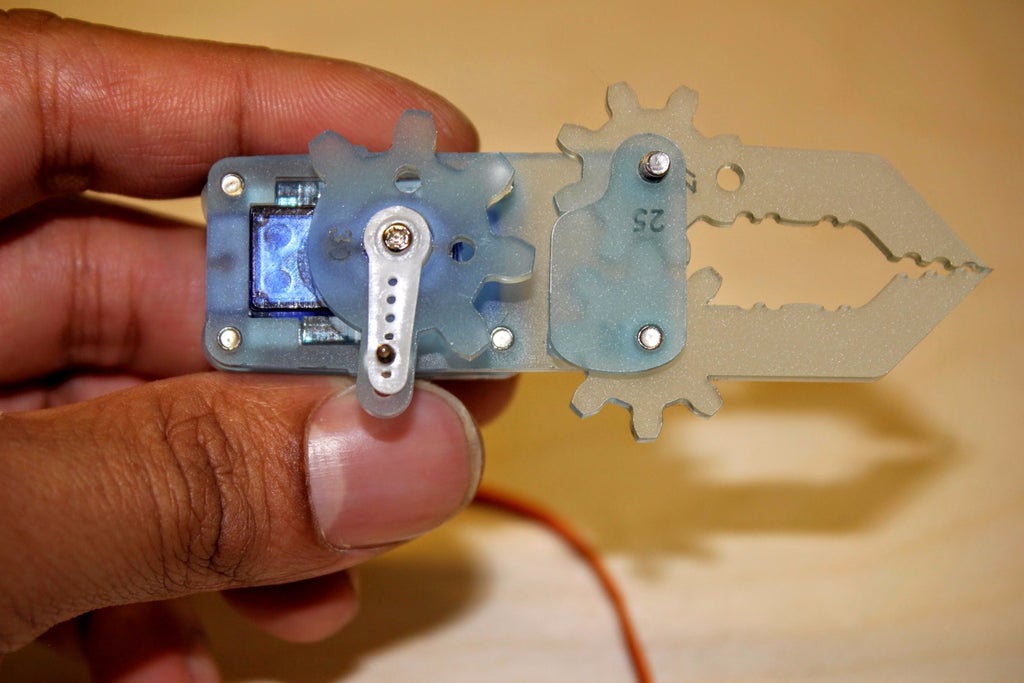
我们将在这里介绍最新版机械臂的安装方法。这个版本的机械臂经过多次更新和改良,结构更加合理。适合用于机械和电子方面的入门学习、也可以作为毕业论文设计的材料。 Step 1: 对舵机进…
