原创文章,作者:奇果派工坊,如若转载,请注明出处:https://www.7gp.cn/503

MotorShiled V1-V3程序下载
【奇果派】视频遥控小车安装教程-带4G模块 点击查看开发板资料 下载App 目前仅支持安卓版App 4G版-步骤1: 配对车子 如购买的是4G版套餐,发货清单会有一个4G通讯模组,…
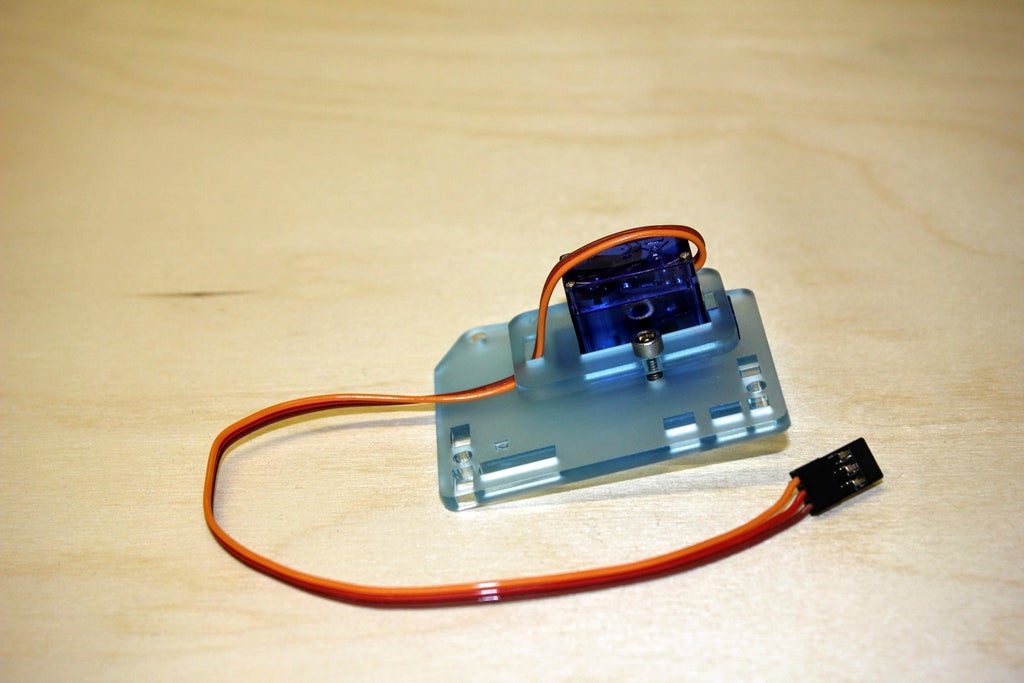
准备 安装机械臂之前,要调整舵机初始角度,否则会影响机械臂活动范围或者卡死。套件提供的舵机运行范围是0-180度,初始角度处于居中(90度)即可。 *舵机长时间堵转(卡死)增加功耗…
一.概述 我们提供基于Arduino平台的ESP32示例代码,提供了蓝牙手柄、ps2手柄的无线连接示例,以及对直流电机、舵机、编码器电机、电压传感器、陀螺仪和OLED显示屏等设备的…
一.概述 我们为驱动板提供了物联网解决方案,局域网内使用socket协议,跨网使用Mqtt协议。 如购买的套餐包含了4G模块,我们出厂会配置好该模块,您上手即可使用; 如购买的套餐…
我们将在这里介绍最新版机械臂的安装方法。这个版本的机械臂经过多次更新和改良,结构更加合理。适合用于机械和电子方面的入门学习、也可以作为毕业论文设计的材料。 Step 1: 对舵机进…
这是基于Arduino开发运动机器人非常完美的解决方案,这款电机驱动器足够强大,可以驱动4个直流电机或2个步进电机,并且额外提供8路全速PWM控制,可以控制8路舵机。支持PS2无线手柄,充分发挥PS2手柄的强大功能。
一. 准备器材 1.ps2无线手柄,某宝购入(建议买带插针的,直接接的貌似干扰比较强) 2.arduino UNO板,某宝购入 3.杜邦线(母对母)若干,某宝购入 4.转接板(选购…
程序下载:Arduino巡线示例代码 《MEARM机械臂安装教程》 小车机械臂安装机手册,请访问以上文章链接,安装机械臂。机械臂无需底座,可从Step 4开始。 《麦克纳姆轮小车V…
